|
ū„š▀:
Ūf õJ -
1. ĒŚ─┐▒│Š░
ć°╝ę┤¾┴”░lš╣╝āļŖäėŲ¹▄ć«aśIŻ¼ī”ė┌Łh▒Ż║═┐╔│ų└m░lš╣Ą─┐╝æ]╩Ūę╗ĘĮ├µŻ¼┴Ēę╗ĘĮ├µät╩Ūęį┤╦×ķŲ§ÖC░lš╣ūįų„ŲĘ┼ŲĪŻ╝āļŖäėŲ¹▄ćęįäė┴”ļŖ│ž░³ū„×ķ─▄┴┐üĒį┤Ż¼ęįļŖäėÖCū„×ķ▄ć▌vąą±éäė┴”į┤Ż¼Ųõ║╦ą─╝╝ągę▓š²╩Ū¾w¼Fį┌š¹▄ć┐žųŲŲ„ĪóļŖÖC┐žųŲŲ„ęį╝░ļŖ│ž╣▄└ĒŽĄĮy╔ŽĪŻ░lš╣ūįų„ŲĘ┼ŲĄ─╗∙▒Šę¬Ū¾▒Ń╩Ū꬚Ų╬š║╦ą─╝╝ągŻ¼ī”ė┌╝āļŖäėŲ¹▄ć«aśIČ°čįŻ¼š²╩Ū¾w¼Fį┌▒žĒÜšŲ╬šŲõ╚²┤¾ļŖ┐žå╬į¬Ą─ķ_░l╝╝ągĪŻ£yįćū„×ķčą░lĄ─ę╗éĆųžę¬Łh╣ØŻ¼Ųõųžę¬ąįę▓▓╗╚▌║÷ęĢĪŻ
2. ┐žųŲ▓▀┬į£yįćŲĮ┼_┐é¾wįOėŗ
ī”ė┌š¹▄ć┐žųŲŲ„Č°čįŻ¼Ųõ▒Š╔Ē┐╔ęįĘų×ķ┐žųŲŲ„ė▓╝■║═┐žųŲŲ„ųąĄ─ŪČ╚ļ╩Į▄ø╝■ā╔┤¾▓┐ĘųĪŻš¹▄ć┐žųŲŲ„ė▓╝■═©│ŻĮYśŗ▌^×ķŪÕ╬·├„┴╦Ż¼ų„ę¬░³└©ų„┐žąŠŲ¼Ą─ūŅąĪŽĄĮyęį╝░ŽÓæ¬Ą─═Ōć·Įė┐┌ļŖ┬ĘĪŻ╚ń╣¹▓╗┐╝æ]Š▀¾wąŠŲ¼ą═╠¢ęį╝░īŹļH▀\ė├Ą─Š▀¾w═ŌįOŻ¼Č°ų╗┐╝æ]š¹▄ć┐žųŲŲ„Ą─ę╗░Ńąį╣”─▄Ż¼š¹▄ć┐žųŲŲ„ė▓╝■╣”─▄ĮYśŗ╚ńłD1╦∙╩ŠĪŻ
łD1 š¹▄ć┐žųŲŲ„ė▓╝■ĮYśŗłD
š¹▄ć┐žųŲŲ„ū„×ķ╝āļŖäė▄ćš¹▄ćĄ─ę╗éĆ▓┐ĘųŻ¼«öš¹▄ć┐žųŲŲ„Ę┼ų├ė┌īŹļH▄ć▌v╔Ž▀\ąąĄ─Ģr║“Ż¼ė╔▄ć▌dąŅļŖ│ž×ķš¹▄ć┐žųŲŲ„╣®ļŖŻ¼īŹ▄ć╔ŽĄ─╠ż░ÕĪóÖn╬╗ęį╝░Ė„é„ĖąŲ„╠ß╣®š¹▄ć┐žųŲŲ„▒žę¬╝żäŅą┼╠¢Ż¼ŲõėÓļŖ┐žå╬į¬Įė╩šš¹▄ć┐žųŲŲ„╦∙░l│÷Ą─Ė„ŅÉųĖ┴ŅŻ¼▓óĘ┤ü«öŪ░Ą─ĀŅæBĮoš¹▄ć┐žųŲŲ„ĪŻ┐╝æ]▒╚▌^Ųš▒ķĄ─ŪķørŻ¼š¹▄ć┐žųŲŲ„Įė┐┌ŅÉą═╚ń▒Ē1╦∙╩ŠĪŻ
▒Ē1 ┼_╝▄ąĶę¬ų¦│ųĄ─Įė┐┌ŅÉą═
|
Įė┐┌ŅÉą═
|
īŹ¼F╣”─▄
|
|
─ŻöMą┼╠¢▌ö│÷
|
Įoš¹▄ć┐žųŲŲ„╠ß╣®─ŻöMŅÉą═Ą─╝żäŅą┼╠¢
|
|
─ŻöMą┼╠¢▓╔╝»
|
▓╔╝»š¹▄ć┐žųŲŲ„Ą──ŻöMŅÉą═Ą─Ę┤üęį╝░┐žųŲą┼╠¢
|
|
öĄūųą┼╠¢▌ö│÷
|
Įoš¹▄ć┐žųŲŲ„╠ß╣®öĄūųŅÉą═Ą─╝żäŅą┼╠¢
|
|
öĄūųą┼╠¢▓╔╝»
|
▓╔╝»š¹▄ć┐žųŲŲ„Ą─öĄūųŅÉą═Ą─Ę┤üęį╝░┐žųŲą┼╠¢
|
|
├}īÆš{ųŲą┼╠¢░l╦═
|
Įoš¹▄ć┐žųŲŲ„╠ß╣®PWMŅÉą═Ą─╝żäŅą┼╠¢
|
|
├}īÆš{ųŲą┼╠¢Įė╩š
|
▓╔╝»š¹▄ć┐žųŲŲ„Ą─PWMŅÉą═Ą─Ę┤üęį╝░┐žųŲą┼╠¢
|
|
CAN┐éŠĆł¾╬─░l╦═
|
Ž“š¹▄ć┐žųŲŲ„░l╦═CAN┐éŠĆł¾╬─
|
|
CAN┐éŠĆł¾╬─Įė╩š
|
▓╔╝»š¹▄ć┐žųŲŲ„░l╦═Ą─CAN┐éŠĆł¾╬─
|
į┌ķ_╩╝ī”š¹▄ć┐žųŲŲ„▀Mąą£yįćĢrŻ¼┼_╝▄Ģ■░┤šš£yįćė├└²ųŚlĮo│÷╝żäŅą┼╠¢Ż¼═¼ĢrųŚl┼ąöÓĘ┤üą┼╠¢Ż¼ĻPė┌£yįćė├└²║═ŲõŠÄ▌ŗ▓┐Ęųīóį┌║¾├µĮķĮBĪŻ×ķ┴╦╩╣│╠ą“▀ē▌ŗĖ³ŪÕ╬·Ūę╠ßĖ▀│╠ą“Ą─öUš╣ąįŻ¼£yįć┼_╝▄š¹¾wĮYśŗ╚ńłD2╦∙╩ŠĪŻ
łD2 £yįć┼_╝▄š¹¾wĮYśŗ
3 ░Õ┐©┐žųŲ▓┐Ęų│╠ą“īŹ¼F
╔Žę╗╣ØĮo│÷Ą─š¹¾wĮYśŗīó£yįćŲĮ┼_Ęų×ķ░Õ┐©┐žųŲ▓┐Ęųęį╝░£yįć╣”─▄īŹ¼F▓┐ĘųĪŻ▀@ę╗╣Øų„ę¬īŹ¼F░Õ┐©Ą─┐žųŲ▓┐Ęų│╠ą“ĪŻ
3.1 DAQmxöĄō■▓╔╝»▌ö│÷▓┐Ęų
└¹ė├DAQmx▀Mąąą┼╠¢Ą─▓╔╝»ĢrŻ¼═©│Ż░³║¼ęįŽ┬ÄūéĆ▓Į¾EŻ║äōĮ©╠ōöM═©Ą└ĪóįOų├▓╔śėŅl┬╩Īóåóäė╚╬äšĪó▓╔╝»öĄō■Īó┤µā”öĄō■Īó═Żų╣╚╬äšĪóŪÕ│²╚╬äšĪŻDAQmxĄ─ę╗éĆĄõą═┴„│╠łD╚ńłD3╦∙╩ŠĪŻ
łD3 DAQmxöĄō■▓╔╝»▌ö│÷┴„│╠
3.2 CAN┐éŠĆ╩š░l▓┐Ęų
īŹ¼FCAN┐éŠĆ╩š░l═©│Ż░³└©ęįŽ┬ÄūéĆ▓Į¾EŻ║äōĮ©Įė╩šĢ■įÆĪóäōĮ©░l╦═Ģ■įÆĪóįOų├▓©╠ž┬╩Īóķ_╩╝Ģ■įÆĪóūx╗“īæCANł¾╬─Īó═Żų╣Ģ■įÆĪóŪÕ│²Ģ■įÆĪŻę╗éĆĄõą═Ą─│╠ą“CAN┐éŠĆ╩š░l┴„│╠łD╚ń4╦∙╩ŠĪŻ
łD4 CAN┐éŠĆ╩š░l┴„│╠łD
4 . £yįć╣”─▄īŹ¼F
╚ń╣¹£yįćŲĮ┼_│╠ą“░┤╣”─▄äØĘųŻ¼ų„ę¬īŹ¼FęįŽ┬╣”─▄Ż║
1Ż®┐žųŲŲ„ė▓ŠĆĮė┐┌┼õų├Ż║░┤šš┤²£y┐žųŲŲ„Įė┐┌Č©┴x┼õų├įOéõė▓╝■═©Ą└ĪŻ
2Ż®CAN┐éŠĆ═©ą┼ģfūh┼õų├Ż║ī¦╚ļCANdb++┼õų├Ą─CAN═©ą┼ģfūhĪŻ
3Ż®£yįćė├└²Ą─┼õų├Ż║ī¦╚ļExcelŠÄ▌ŗĄ─£yįćė├└²╬─╝■ĪŻ
4Ż®┐žųŲ▓▀┬į£yįćŻ║Ė∙ō■£yįćė├└²ī”┐žųŲ▓▀┬į▀Mąą£yįćĪŻ
5Ż®┐žųŲŲ„─═Š├£yįćŻ║ī”┐žųŲŲ„▀MąąčŁŁh─═Š├£yįćĪŻ
6Ż®īŹĢrą┼╠¢ė^£yŻ║ė^▓ņ╗“┐žųŲįOéõĖ„═©Ą└▌ö╚ļ▌ö│÷ĪŻ
4.1 ┐žųŲŲ„ė▓ŠĆĮė┐┌┼õų├
Įė┐┌┼õų├ų„ę¬Ęų×ķ─ŻöM╝żäŅ═©Ą└Īó─ŻöMĘ┤ü═©Ą└ĪóöĄūų╝żäŅ═©Ą└ĪóöĄūųĘ┤ü═©Ą└ĪóPWM╝żäŅ═©Ą└ĪóPWMĘ┤ü═©Ą└Ż¼ę▓╝┤│²CAN═©Ą└═ŌĄ─╦∙ėąė▓ŠĆ═©Ą└ĪŻš¹▄ć┐žųŲŲ„Įė┐┌┼õų├Įń├µ╚ńłD5╦∙╩ŠĪŻ
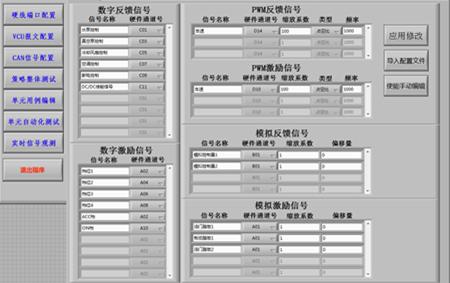
łD5 š¹▄ć┐žųŲŲ„Įė┐┌┼õų├Įń├µ
×ķ┴╦╣Ø╩ĪųžÅ═ė▓ŠĆ┼õų├▀^│╠╦∙╗©┘MĄ─ĢrķgŻ¼▓óĮĄĄ═▌ö╚ļ▀^│╠┐╔─▄│÷¼FĄ─Õeš`Ż¼£yįć▄ø╝■ų¦│ųė▓ŠĆ┼õų├╬─╝■Ą─ī¦╚ļĪŻīó╦∙ėąĮė┐┌ą┼Žóīæ╚ļ┼õų├╬─╝■Ż¼▓óį┌£yįć▄ø╝■Įń├µųąī¦╚ļįō╬─╝■üĒīŹ¼Fą┼Žóõø╚ļŻ¼┼õų├╬─╝■īŹļH╔Ž╩Ūę╗éĆExcel╬─ÖnŻ¼Excel╬─ÖnĄ─ę╗éĆ║åå╬└²ūė╚ń▒Ē2╦∙╩ŠĪŻ
▒Ē2 ė▓ŠĆ┼õų├╬─╝■╩Š└²
|
ŅÉą═
|
ą┼╠¢├¹ĘQ
|
╬’└Ē═©Ą└
|
┐sĘ┼ŽĄöĄ
|
Ų½ęŲ┴┐
|
Ņl┬╩(PWM╠žėą)
|
|
AO
|
╝ė╦┘╠ż░Õ1
|
C02
|
1
|
0
|
ĪĪ
|
|
AO
|
╝ė╦┘╠ż░Õ2
|
D02
|
1
|
0
|
ĪĪ
|
|
AO
|
ųŲäė╠ż░Õ1
|
C04
|
1
|
0
|
ĪĪ
|
|
AO
|
ųŲäė╠ż░Õ2
|
D04
|
1
|
0
|
ĪĪ
|
|
DO
|
Ön╬╗ą┼╠¢1
|
C01
|
1
|
0
|
ĪĪ
|
|
DO
|
Ön╬╗ą┼╠¢2
|
D01
|
1
|
0
|
ĪĪ
|
|
DO
|
ĶĆ│ū╬╗ų├1
|
C01
|
1
|
0
|
ĪĪ
|
|
DO
|
ĶĆ│ū╬╗ų├2
|
D01
|
1
|
0
|
ĪĪ
|
|
DI
|
MCU└^ļŖŲ„
|
C09
|
1
|
0
|
ĪĪ
|
|
DI
|
DCDC└^ļŖŲ„
|
D09
|
1
|
0
|
ĪĪ
|
|
DI
|
┐šš{└^ļŖŲ„
|
C11
|
1
|
0
|
|
|
DI
|
CCS└^ļŖŲ„
|
D11
|
1
|
0
|
|
|
PI
|
▄ć╦┘ą┼╠¢
|
E08
|
1
|
0
|
1000
|
▒ĒĖ±ų„ę¬ā╚╚▌×ķŻ║ą┼╠¢ŅÉą═Ż¼ą┼╠¢├¹ĘQŻ¼╬’└Ē═©Ą└Ż¼┐sĘ┼ŽĄöĄŻ¼Ų½ęŲ┴┐Ż¼ęį╝░ßśī”PWMą┼╠¢Ą─Ņl┬╩ĪŻ
1Ż®ą┼╠¢ŅÉą═Ż¼▀@└’▓╔ė├ėó╬─┐sīæüĒ▒Ē╩ŠŻ¼ų„ę¬Ęų×ķęįŽ┬ÄūŅÉĪŻ
AOŻ║─ŻöMą┼╠¢▌ö│÷═©Ą└Ż¼ė├ė┌ĮoVCU─ŻöMą┼╠¢╝żäŅ
AIŻ║─ŻöMą┼╠¢▌ö╚ļŻ¼ė├ė┌▓╔╝»VCU─ŻöMą┼╠¢Ę┤ü
DOŻ║öĄūųą┼╠¢▌ö│÷═©Ą└Ż¼ė├ė┌ĮoVCUöĄūųą┼╠¢╝żäŅ
DIŻ║öĄūųą┼╠¢▌ö╚ļŻ¼ė├ė┌▓╔╝»VCUöĄūųą┼╠¢Ę┤ü
POŻ║Ņl┬╩ą┼╠¢▌ö│÷═©Ą└Ż¼ė├ė┌ĮoVCUŅl┬╩ą┼╠¢╝żäŅ
PIŻ║Ņl┬╩ą┼╠¢▌ö╚ļŻ¼ė├ė┌▓╔╝»VCUŅl┬╩ą┼╠¢Ę┤ü
2Ż®ą┼╠¢├¹ĘQŻ¼ų„ę¬ė├ė┌ą┼╠¢║═║¾├µīóė├ĄĮĄ─£yįćė├└²▀MąąĻP┬ōŻ¼ę“┤╦ą┼╠¢├¹ĘQ▒žĒÜ║═£yįćė├└²ųąĄ─ą┼╠¢├¹ĘQę╗ų┬ĪŻ
3Ż®╬’└Ē═©Ą└Ż¼×ķ┴╦▒Ńė┌ŠÄīæ║═¼Fł÷▓┘ū„Ż¼╬’└Ē═©Ą└ė├BOB║ąūėŠÄ╠¢üĒ▒Ē╩ŠŻ¼▄ø╝■īóĖ∙ō■ŠÄ╠¢ūįäėĻP┬ōŠ▀¾wĄ─╬’└Ē═©Ą└ĪŻ
4Ż®┐sĘ┼ŽĄöĄęį╝░Ų½ęŲ┴┐Ż¼▒Ē╩Š╬’└Ē┴┐╚ĪųĄ║═īŹļHą┼╠¢ļŖē║ų«ķgĄ─ĻPŽĄĪŻ▀@ā╔éĆģóöĄų„ę¬ßśī”─ŻöMą┼╠¢ĪŻ
4.2 CAN┐éŠĆ═©ą┼ģfūh┼õų├
ŲĮ┼_▄ø╝■ų¦│ųDBC╬─╝■Ą─ĮŌ╬÷Ż¼└¹ė├CANdb++╔·│╔Ą─DBC╬─╝■┐╔ęįų▒Įėī¦╚ļŻ¼³cō¶“ ”Ż¼į┌╬─╝■▀xō±ī”įÆ┐“ųą▀xō±ę¬ī¦╚ļĄ─DBC╬─╝■ĪŻ│╠ą“ūįäėĮŌ╬÷DBC╬─╝■Ż¼╠ß╚Ī│÷╦∙ėął¾╬─Ą─Ą─ł¾╬─├¹ĘQĪół¾╬─IDĪó░l╦═╣سcŻ¼ęį╝░╦∙ėąą┼╠¢Ą─ą┼╠¢├¹ĘQĪó╦∙ī┘ł¾╬─Īóą┼╠¢Ų╩╝╬╗ų├Īóą┼╠¢ķLČ╚Īó┤µā”Ė±╩ĮĪó┐sĘ┼ŽĄöĄĪóŲ½ęŲ┴┐Ą╚ą┼ŽóĪŻł¾╬─┼õų├Įń├µ╚ńłD6╦∙╩ŠĪŻ ”Ż¼į┌╬─╝■▀xō±ī”įÆ┐“ųą▀xō±ę¬ī¦╚ļĄ─DBC╬─╝■ĪŻ│╠ą“ūįäėĮŌ╬÷DBC╬─╝■Ż¼╠ß╚Ī│÷╦∙ėął¾╬─Ą─Ą─ł¾╬─├¹ĘQĪół¾╬─IDĪó░l╦═╣سcŻ¼ęį╝░╦∙ėąą┼╠¢Ą─ą┼╠¢├¹ĘQĪó╦∙ī┘ł¾╬─Īóą┼╠¢Ų╩╝╬╗ų├Īóą┼╠¢ķLČ╚Īó┤µā”Ė±╩ĮĪó┐sĘ┼ŽĄöĄĪóŲ½ęŲ┴┐Ą╚ą┼ŽóĪŻł¾╬─┼õų├Įń├µ╚ńłD6╦∙╩ŠĪŻ
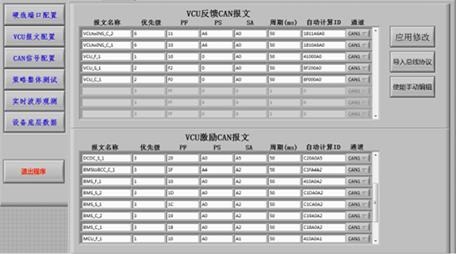
łD6 CANł¾╬─┼õų├Įń├µ
CANą┼╠¢┼õų├▓┐Ęų║═CANł¾╬─┼õų├▓┐Ęųļm╚╗ø]ėąĘ┼į┌═¼ę╗ĒōŻ¼Ą½ī¦╚ļDBC╬─╝■ĢrŻ¼ā╔š▀Ą─ą┼Žóõø╚ļ╩Ū═¼Ģr═Ļ│╔Ą─Ż¼CANą┼╠¢┼õų├Įń├µ╚ńłD7╦∙╩ŠĪŻ
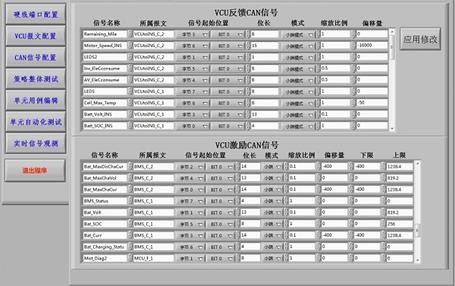
łD7 CANł¾╬─ą┼╠¢┼õų├Įń├µ
4.3 £yįćė├└²┼õų├
š¹¾w£yįćĄ─£yįćė├└²īŹļH╔Ž╩Ūę╗éĆExcel▒ĒĖ±Ż¼▒ĒŅ^Ęų×ķā╔ŅÉą┼ŽóŻ¼ę╗ŅÉ╩Ūė├ą┼╠¢├¹▒Ē╩ŠĄ─ą┼╠¢┴ą▒ĒĪŻ┴Ēę╗ŅÉät╩Ū╦∙ę¬ĻPūóĄ─ą┼╠¢ķōųĄŻ¼ė├ĻPµIūų“Limit#”╝ė╔ŽŠ▀¾wą┼╠¢├¹ĮM│╔ĪŻ▒ĒĖ±Ą─├┐ę╗ąą▒Ē╩Šę╗Ślė├└²Ż¼Įo│÷£yįćė├└²Ą─ĢrķgĪóĖ„╝żäŅą┼╠¢Ą─╚ĪųĄĪóĘ┤üą┼╠¢Ą─ŅA┴¶╬╗ų├ęį╝░£yįćė├└²═©▀^Ą─ķōųĄŻ¼Š▀¾wĄ─ķōųĄė├ą╬╚ń“20#30”üĒ▒Ē╩Šį┌20║═30ų«ķgĪŻŠ▀¾wīŹ└²╚ń▒Ē3╦∙╩ŠĪŻ
▒Ē3 ║åå╬Ą─£yįćė├└²╩Š└²
|
Ģrķg
|
╝żäŅą┼╠¢1
|
╝żäŅą┼╠¢2
|
Ę┤üą┼╠¢1
|
Ę┤üą┼╠¢2
|
Limit#
Ę┤üą┼╠¢1
|
Limit#
Ę┤üą┼╠¢2
|
|
0.05
|
1
|
1
|
ĪĪ
|
ĪĪ
|
0#0
|
1#2
|
|
0.1
|
2
|
0
|
ĪĪ
|
ĪĪ
|
1#1
|
5#8
|
|
0.15
|
3
|
0
|
ĪĪ
|
ĪĪ
|
1#1
|
12#15
|
|
0.2
|
4
|
1
|
ĪĪ
|
ĪĪ
|
0#0
|
20#25
|
|
0.25
|
5
|
0
|
ĪĪ
|
ĪĪ
|
0#0
|
30#35
|
|
0.3
|
6
|
0
|
ĪĪ
|
ĪĪ
|
1#1
|
40#45
|
|
0.35
|
7
|
1
|
ĪĪ
|
ĪĪ
|
0#0
|
50#55
|
▀@└’VCU╩▄“╝żäŅą┼╠¢1”║═“╝żäŅą┼╠¢2”▀@ā╔┬Ęą┼╠¢ė░ĒæĪŻ£yįćė├└²┐╝▓ņ“Ę┤üą┼╠¢1”║═“Ę┤üą┼╠¢2”▀@ā╔┬Ęą┼╠¢Ż¼ą┼╠¢Ą─═©▀^ķōųĄ╩Ū“Limit#Ę┤üą┼╠¢1”ęį╝░“Limit#Ę┤üą┼╠¢2”ĪŻ
4.4 ┐žųŲ▓▀┬į£yįćīŹ¼F
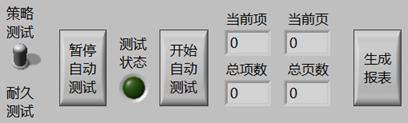
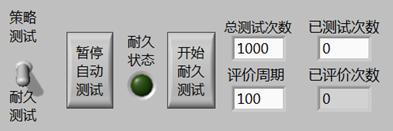
«öŠÄ▌ŗ║├£yįćė├└²Ż¼Š═┐╔ęį▀Mąą▓▀┬įš¹¾w£yįćŻ¼▄ø╝■Įń├µ╚ńłD8╦∙╩ŠŻ¼£yįć▀^│╠ųąŻ¼Ė„éĆ┴ą▒Ēīó’@╩Š£yįćŽÓĻPą┼╠¢Ą─╚ĪųĄŻ¼═¼Ģr’@╩Š«öŪ░£yįćė├└²Ą─┐éĒōöĄ║═┐éĒŚöĄŻ¼ęį╝░«öŪ░£yįćĒŚĄ─ą“╠¢ĪŻ

łD8 ▓▀┬įš¹¾w£yįćĮń├µ
4.5 ┐žųŲŲ„─═Š├£yįćīŹ¼F
▓▀┬į£yįć║═─═Š├£yįć╣”─▄į┌═¼ę╗Įń├µ╔ŽīŹ¼FŻ¼▓╔ė├ķ_ĻPį┌ā╔ĘN£yįćĘĮ╩Įų«ķg▀MąąŪąōQĪŻ«öŪąōQĄĮ▓▀┬į£yįćĘĮ╩ĮŽ┬Ż¼┐žųŲĮń├µ╚ńłD9╦∙╩ŠŻ¼Č°ŪąōQĄĮ─═Š├£yįćĘĮ╩ĮŽ┬Ż¼ät┐žųŲĮń├µ╚ńłD10╦∙╩ŠĪŻ
łD9 ▓▀┬į£yįć┐žųŲ┼_
łD10 ─═Š├£yįć┐žųŲ┼_
║═▓▀┬į£yįćĘĮ╩Į▓┘ū„ĘĮ╩Į╗∙▒Šę╗ų┬Ż¼─═Š├£yįćĘĮ╩ĮŽ┬Ż¼£yįć▄ø╝■īóę└šš“┐é£yįć┤╬öĄ”▀MąąčŁŁh£yįćŻ¼▓óŪęį┌£yįć┤╬öĄ▀_ĄĮ“įuārų▄Ų┌”ĢrŻ¼ī”╦∙ėąą┼╠¢▀Mąąę╗┤╬ėøõøĪŻ▓óŪęī”╦∙ėąĘ┤üą┼╠¢▀Mąą┼ąöÓŻ¼ī”ė┌╬┤═©▀^Ą─ĒŚ─┐Ģ■ė├╝t╔½ś╦│÷Ż¼ĘĮ▒Ń£yįć╚╦åT║¾└mĘų╬÷ĪŻ╝┘įO▒Ē3╦∙╩ŠĄ─£yįćė├└²ėą▓┐Ęų╬┤═©▀^Ż¼─Ū├┤£yįćĮY╣¹╚ń▒Ē10╦∙╩ŠĪŻ
▒Ē10 £yįćĮY╣¹įuār╩Š└²
|
Ģrķg
|
╝żäŅą┼╠¢1
|
╝żäŅą┼╠¢2
|
Ę┤üą┼╠¢1
|
Ę┤üą┼╠¢2
|
Limit#
Ę┤üą┼╠¢1
|
Limit#
Ę┤üą┼╠¢2
|
|
0.05
|
1
|
1
|
ĪĪ0
|
ĪĪ2
|
0#0
|
1#2
|
|
0.1
|
2
|
0
|
ĪĪ1
|
ĪĪ7
|
1#1
|
5#8
|
|
0.15
|
3
|
0
|
ĪĪ0
|
ĪĪ19
|
1#1
|
12#15
|
|
0.2
|
4
|
1
|
ĪĪ0
|
ĪĪ22
|
0#0
|
20#25
|
|
0.25
|
5
|
0
|
ĪĪ1
|
ĪĪ30
|
0#0
|
30#35
|
|
0.3
|
6
|
0
|
ĪĪ0
|
48
|
1#1
|
40#45
|
|
0.35
|
7
|
1
|
ĪĪ0
|
ĪĪ53
|
0#0
|
50#55
|
|
0.4
|
8
|
1
|
ĪĪ0
|
ĪĪ65
|
0#0
|
60#65
|
4.6 īŹĢrą┼╠¢ė^£y
╚ń╣¹ŽŻ═¹į┌£yįć▀^│╠ųąīŹĢrė^£yą┼╠¢Ą─ūā╗»┌ģä▌Ż¼┐╔ęįŪąōQĄĮīŹĢr▓©ą╬ė^£yĮń├µĪŻĒō├µ░³║¼8éƬÜ┴óĄ─▓©ą╬’@╩Š┐ž╝■Ż¼«öįOéõęčķ_åóŪę╠Äė┌£yįć▀^│╠ųąĢrŻ¼▓©ą╬’@╩Š┐ž╝■īóīŹĢr’@╩Šą┼╠¢▓©ą╬Ż¼ė^£yĮń├µ╚ńłD11╦∙╩ŠĪŻ

łD11 īŹĢr▓©ą╬ė^£yĮń├µ
├┐éĆ▓©ą╬’@╩Š┐ž╝■ū¾Ž┬ĮŪėąā╔éĆŽ┬└Ł┴ą▒ĒŻ¼ū¾é╚ę╗éĆįOų├ꬒ@╩ŠĄ─ą┼╠¢ŅÉą═Ż¼ėęé╚ę╗éĆė├ė┌▀xō±ę¬ė^£yĄ─Š▀¾wą┼╠¢Ż¼Ž┬└Ł┴ą▒Ē▀xō±ą┼╠¢╚ńłD12╦∙╩ŠĪŻ
łD12 Ž┬└Ł┴ą▒Ē▀xō±ą┼╠¢
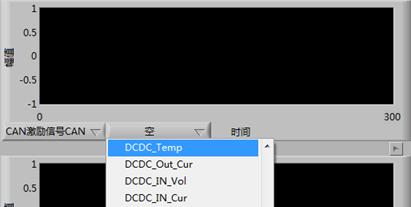
įOéõ╦∙ėą╬’└Ē═©Ą└┐╔ęįų▒Įėė^£y╗“┐žųŲŻ¼┐╔ęįŪąōQĄĮįOéõĄūīėöĄō■ė^£yĮń├µŻ¼į┌▀@ę╗Įń├µ┐╔ęį╩ųäėįOų├▌ö│÷Ą─CANł¾╬─ā╚╚▌Ż¼ęį╝░╦∙ėąė▓ŠĆ═©Ą└Ą─▌ö│÷ųĄĪŻ═¼Ģr─▄ē“ė^▓ņ▌ö╚ļĄ─CANł¾╬─ā╚╚▌Ż¼ęį╝░╦∙ėąė▓ŠĆ═©Ą└▓╔╝»Ą─öĄō■ĪŻįOéõĄūīėöĄō■ė^£yĮń├µ╚ńłD13╦∙╩ŠĪŻ

łD13 įOéõĄūīėöĄō■ė^£y
5 įOéõĮMčb╝░īŹ╬’šf├„
£yįćŲĮ┼_š¹¾w═Ōė^╚ńłD14╦∙╩ŠĪŻłDŲ¼ū¾é╚×ķ£yįćŲĮ┼_▒│├µŻ¼▒│├µ░▓čb┴╦7éĆ║Į┐š▓ÕŅ^Ż¼īó╦∙ėąĮėŠĆ║ąÅ─įOéõųąę²│÷Ż¼▀BĮė┤²£y┐žųŲŲ„ĪŻėęé╚×ķ£yįćŲĮ┼_š²├µŻ¼ūŅ╔ŽĘĮĘųäe╩Ū┐éķ_╣ŌĪó┐šÜŌķ_ĻPĪóųĖ╩Š¤¶Īó╝▒═Żķ_ĻPĪŻųąķgät╩Ū’@╩ŠŲ„µI╩¾╠ū╝■Ż¼’@╩ŠŲ„Ž┬ĘĮät╩ŪPXIÖCŽõŻ¼╦∙ėą░Õ┐©Ą─ŠĆ╩°Č╝Įė╚ļÖC╣±ā╚▓┐ĪŻūŅŽ┬ĘĮ╩Ū│╠┐žļŖį┤Ż¼ų„ę¬ė├ė┌ū÷ļŖąį─▄£yįćŻ¼▀@└’▓╗ī”Ųõū÷įö╝Üšf├„ĪŻ

łD14 įOéõīŹ╬’ššŲ¼
6 . ╚½╬─┐éĮY
š¹▄ć┐žųŲŲ„Įy╗I▄ćā╚Ė„▓┐╝■ģfš{╣żū„Ż¼╩Ū╝āļŖäė▄ćš¹▄ćĄ─║╦ą─▓┐╝■ų«ę╗Ż¼▒Š╬─ĮĶų·NI╣½╦ŠĄ─LabVIEW║═PXIŲĮ┼_Ż¼×ķ╝āļŖäė▄ćĄ─š¹▄ć┐žųŲŲ„ķ_░l┴╦▓▀┬į£yįć┼_╝▄Ż¼ī”┐žųŲŲ„Ą─┐žųŲ▓▀┬į▀Mąą£yįć║═“×ūCĪŻ£yįć┼_╝▄¼FęčĮ╗ĖČų„ÖCÅS╝┤╩╣ė├Ż¼ė├æ¶╩╣ė├Ę┤ė│┴╝║├Ż¼Į±║¾ätīóĖ∙ō■ė├æ¶ąĶŪ¾▓╗öÓī”£yįć┼_╝▄▀Mąąā×╗»Ż¼žSĖ╗£yįć┼_╝▄╣”─▄ĪŻ
|

