|
ū„š▀:
ąņ ├═ -
1Īóę²čį
▄ć▌vĖ„ŽĄĮy╝░┴Ń▓┐╝■Ą─ŲŻä┌─═Š├ąį─▄╩ŪįuārŲ¹▄ć┘|┴┐Ą─ųžę¬ųĖś╦ĪŻę“┤╦ķ_░l═©ė├Ą──═Š├įć“×čbų├ī”Ė„┴Ń▓┐╝■▀Mąą£yįć╩Ū▄ć▌vķ_░l▀^│╠ųąĄ─śO×ķųžę¬Ą─╣żū„���ĪŻ▒Š╬─ęį─│┐Ņ▄ćą═Ą─ōQō§ŚU─═Š├įć“×┼_Ą─┤ŅĮ©×ķ└²���Ż¼ŽĄĮyšf├„┴╦╣ŌļŖķ_ĻPū„ė├įŁ└Ē����Īóķ_ĻPė|░lą┼╠¢▓╔╝»ĪóLABVIEWŠÄųŲ┐žųŲ│╠ą“╝░═©▀^LABVIEWĄ─Modbusģfūh┐žųŲ╦┼Ę■ļŖÖC╝╝ągĄ╚ĻPµIå¢Ņ}Ż¼▓óßśī”īŹļHųą┐╔─▄│÷¼FĄ─å¢Ņ}į÷╝ė┴╦ā×╗»│╠ą“—śOŽ▐╬╗ų├Ę┤▐D▒ŻūoĘĮ░Ė�����Ż¼▒▄├Ō┴╦įć“×┼_▀\ąąųą┐╔─▄│÷¼FĄ─Õeš`���ĪŻ
2����ĪóŽĄĮyķ_░l▒│Š░
▄ć▌vĄ─ōQō§ŚUįć“×┼_ė├üĒ┐╝║╦ōQō§ŽĄĮyĄ──═Š├ąį─▄Ą─īŻė├įOéõŻ¼ę▓╩Ū▄ć▌v┴Ń▓┐╝■įć“×ųąųžę¬Ą─įć“×ų«ę╗ĪŻ╚ń─│┐Ņ▄ćą═įć“×ę¬Ū¾╚ńŽ┬Ż║ōQō§ŚUĮø40╚f┤╬įć“×║¾���Ż¼ōQō§ŚUĖ„┴Ń▓┐╝■¤oŲŲ┴čŻ¼▓┘ū„ņ`╗ŅŪę¤o┐©£■¼FŽ¾Ż╗ōQō§ŚU┴”▌d║╔60N��Ż¼Ņl┬╩ę¬Ū¾0.5Hz�����ĪŻŲõųą▀\ąą┤╬öĄĪóōQō§┴”▌d║╔╝░▀\ąąŅl┬╩Š∙ę¬Ū¾īŹĢr┐╔ūā�����ĪŻłD 1×ķūŅĮK┤ŅĮ©Ą─ōQō§ŚU─═Š├įć“×┼_��ĪŻŲõųąųžēKū„×ķžō▌d�Ż¼╦┼Ę■ļŖÖCĦäė▐D▒Pą²▐DŻ¼═©▀^┼c▐D▒P▀BĮėĄ─└ŁŚUÖCśŗīŹ¼FōQō§ŚUäėū„����Ż¼ōQō§ŚUĄ─ā╔éĆśOŽ▐╬╗ų├Ęųäe═©▀^ā╔éĆĶFŲ¼║═ę╗éĆ╣Ō³cķ_ĻP┤_Č©��Ż¼▓óé„▌öĄĮUSB-6251ųą��Ż¼ė╔ė┌╦┼Ę■ļŖÖC┼c▐D▒PĄ─é„äė▒╚×ķ10Ż¼ätļŖÖC▐D╦┘įOČ©×ķ33rpm�Ż¼ØMūŃįć“×ę¬Ū¾��ĪŻ
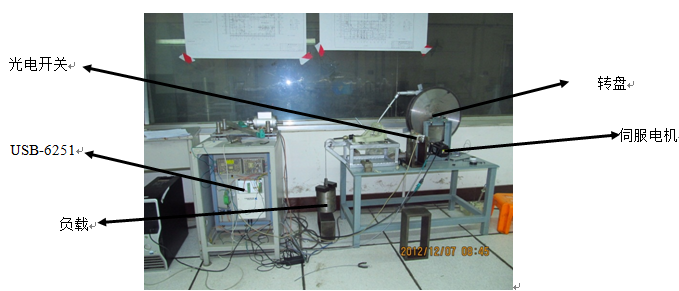
1 ōQō§ŚU─═Š├įć“×┼_
3�����ĪóŽĄĮyĮM│╔╝░┐é¾wįOėŗĘĮ░Ė
Ė∙ō■ŽĄĮyĄ─╣”─▄ę¬Ū¾▒ŠŽĄĮy░³└©╔Ž╬╗ÖCĪóNIöĄō■▓╔╝»┐©USB-6251Īó╣ŌļŖķ_ĻPĪóĮ╗┴„╦┼Ę■ļŖÖCĮM│╔�����Ż¼ÖCąĄčbų├╬Õ▓┐Ęų��Ż¼ŽĄĮyĮM│╔┐“łD╚ńłD 2╦∙╩Š����ĪŻ▒Ščbų├▓╔ė├├└ć°ć°╝ęāx▒Ē╣½╦ŠŻ©National Instruments��Ż¼║åĘQNIŻ®ķ_░lĄ─öĄō■▓╔╝»┐©USB-6251īŹĢr▓╔╝»╣ŌļŖķ_ĻPĄ──ŻöMļŖē║ą┼╠¢Ż¼«öÖCąĄčbų├į┌▀\ąąąą│╠ųą╣ŌļŖķ_╣Ō▌ö│÷Ė▀ļŖŲĮ�Ż¼╔Ž╬╗ÖC▓╗äėū„����Ż╗Č°ÖCąĄčbų├▀\ąąĄĮŅAŽ╚įOų├╔Ž/Ž┬śOŽ▐╬╗ų├Ģr�Ż¼╣ŌļŖķ_ĻP▌ö│÷Ą═ļŖŲĮŻ¼╔Ž╬╗ÖCĖ∙ō■ė├LabviewŠÄėåĄ─│╠ą“═Ļ│╔ėŗöĄ�Īó’@╩Š╝░┼ąöÓĄ╚╣żū„�Ż¼▓ó═©▀^Modbusģfūh┐žųŲ╦┼Ę■ļŖÖCŽ“Ę┤ĘĮŽ“▀\ąą��Ż¼Å─Č°ÖCąĄčbų├▀M╚ļŽ┬ę╗éĆ裣hų▄Ų┌��Ż¼ų▒ų┴▀\ąą┤╬öĄØMūŃę¬Ū¾����ĪŻ▀\ąąŅl┬╩/╦┘Č╚ė╔╦┼Ę■ļŖÖCĄ─╦┘Č╚▀\ąą─Ż╩ĮīŹ¼F����ĪŻ
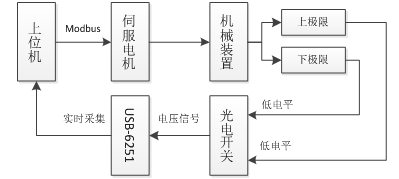
2 ŽĄĮyĮM│╔┐“łD
3.1 é„ĖąŲ„╝░öĄō■▓╔╝»ĘĮ░Ė
╣ŌļŖķ_ĻP╩Ū═©▀^░č╣ŌÅŖČ╚Ą─ūā╗»▐DōQ│╔ļŖą┼╠¢Ą─ūā╗»üĒīŹ¼F┐žųŲĄ─Ż¼ę╗░ŃŪķė╔░l╦═Ų„��Ż¼Įė╩šŲ„║═Öz£yļŖ┬Ę╚²▓┐Ęųśŗ│╔ĪŻ╦³╩Ū└¹ė├▒╗Öz£y╬’¾wī”╝t═Ō╣Ō╩°Ą─š┌╣Ō╗“Ę┤╔õ�Ż¼ė╔═¼▓Į╗ž┬Ę▀x═©Č°Öz£y╬’¾wĄ─ėą¤o��Ż¼Ųõ╬’¾w▓╗Ž▐ė┌Įī┘����Ż¼ī”╦∙ėą─▄Ę┤╔õ╣ŌŠĆĄ─╬’¾wŠ∙┐╔Öz£y���ĪŻ▒Š╬─▀xė├Ą─┬■Ę┤╔õ╣ŌļŖķ_ĻP╩Ūę╗ĘN╝»░l╔õŲ„║═Įė╩šŲ„ė┌ę╗¾wĄ─é„ĖąŲ„��Ż¼«öėą▒╗Öz£y╬’¾wĮø▀^ĢrŻ¼īó╣ŌļŖķ_ĻP░l╔õŲ„░l╔õĄ─ūŃē“┴┐Ą─╣ŌŠĆĘ┤╔õĄĮĮė╩šŲ„Ż¼ė┌╩Ū╣ŌļŖķ_ĻPŠ═«a╔·┴╦ķ_ĻPą┼╠¢��ĪŻ
▒Š╬─▀xė├NI╣½╦Šķ_░lĄ─USB-6251öĄō■▓╔╝»┐©╝░Labview▄ø╝■Ą─Express╝╝ąg┐ņ╦┘īŹ¼F╣ŌļŖķ_ĻPĄ─īŹĢrļŖē║▓╔╝»���ĪŻUSB-6251öĄō■▓╔╝»┐©╩ŪNI╣½╦ŠūŅą┬═Ų│÷Ą─USB┐éŠĆMŽĄ┴ąöĄō■▓╔╝»«aŲĘ��Ż¼┐╔╠ß╣®Ė▀▀_16┬Ę─ŻöM▌ö╚ļ═©Ą└�Ż¼▓ó▀_ĄĮ1.25 MS/söĄō■▓╔╝»╦┘┬╩����Ż¼Ūęį÷╝ė┴╦USB╝┤▓Õ╝┤ė├Ą─║åå╬ęūė├ąįęį╝░╚½ą┬Ė▀╦┘ą┼╠¢┴„╝╝ągŻ¼┐╔īŹĢr┐ņ╦┘Ą─▓╔╝»Ė„ĘN╬’└Ēą┼╠¢ĪŻExpress╝╝ąg╩ŪLabviewūŅą┬╠ß╣®Ą─ę╗ĘN┐ņĮ▌║å▒Ń┤ŅĮ©īŻśI£yį接ĮyĄ─╝╝ąg[1]����ĪŻ╦³īóĖ„ĘN╗∙▒Š║»öĄ▀Mę╗▓Į┤“░³×ķĖ³╝ėųŪ─▄���Ż¼╣”─▄Ė³╝ėžSĖ╗Ą─║»öĄ����Ż╗▓óī”Ųõųą─│ą®║»öĄ╠ß╣®┼õų├ī”įÆ┐“Ż¼═©▀^┼õų├┐“┐╔ęįī”║»öĄ▀Mąąįö╝ÜĄ─┼õų├��Ż¼ę“┤╦Ųõ┐╔ęįīŹ¼F▌^╔┘Ą─▓Į¾E═Ļ│╔╣”─▄═Ļ╔ŲĄ─£yį接Įy����Ż¼ė╚Ųõī”ė┌Å═ļsĄ─▓╔╝»ŽĄĮyŻ¼Express╝╝ągŲĄĮ┴╦śO┤¾Ą─║å╗»ū„ė├��ĪŻłD 3×ķ╣ŌļŖķ_ĻPļŖē║ą┼╠¢▓╔╝»įOų├łDŻ¼ļŖē║ą┼╠¢ūŅ┤¾ųĄ╝░ūŅąĪųĄįOČ©×ķ+10V╝░-10V��Ż¼▓╔╝»┬╩╝░┤²ūx╚Ī▓╔śėŠ∙įOČ©×ķ1����Ż¼╝┤1├ļ▓╔╝»1éĆ▓óīŹĢrĄ─é„ĄĮ╔Ž╬╗ÖC�����Ż¼▓╔╝»─Ż╩ĮįO×ķ▀B└m▓╔śė�ĪŻ
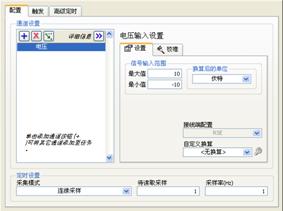
3 ╣ŌļŖķ_╣ŌļŖē║ą┼╠¢▓╔╝»
3.2 Labview┐žųŲ│╠ą“
▓╔╝»ĄĮĄ─╣ŌļŖķ_ĻPą┼╠¢īó▌ö╚ļĄĮ│╠ą“ųął╠ąą┐žųŲ▓▀┬į�����ĪŻ╚ńłD 4╦∙╩Š�����Ż¼DAQų·╩ų×ķ▓╔ė├Express╝╝ągĮ©┴óĄ─╣ŌļŖķ_ĻPļŖē║ą┼╠¢▓╔╝»Ż¼ą┼╠¢īŹĢr▌ö╚ļĄĮ裣hĮYśŗųął╠ąą┼ąČ©���Ż¼▀@└’ķōųĄ▀xČ©×ķ5V��Ż¼╝┤ļŖē║ą┼╠¢┤¾ė┌5V(┤╦ĢrļŖÖCš²│Ż▀\ąą)ĢrŻ¼▓╗ł╠ąą╚╬║╬▓┘ū„Ż╗«öļŖē║ą┼╠¢Ą═ė┌5VĢr(┤╦ĢrļŖÖC▀\ąąĄĮ╔Ž/Ž┬śOŽ▐╬╗ų├)ĢrŻ¼╩ūŽ╚«öŪ░┤╬öĄį÷╝ė0.5(ļŖÖCį┌╔Ž/Ž┬śOŽ▐╬╗ų├ķg▀\ąąę╗éĆüĒ╗žČ©┴x×ķ1)▓ó▒╚▌^«öŪ░┤╬öĄ╩ŪʱĄ╚ė┌裣h┤╬öĄ���Ż¼Ą╚ė┌ät│╠ą“═Żų╣Ż╗▓╗Ą╚ė┌ätļŖÖCĘ┤▐DŻ¼│╠ą“└^└m▀\ąą���ĪŻ
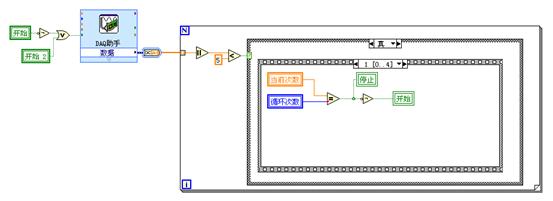
4 ╣ŌļŖķ_ĻPą┼╠¢Ą─┼ąöÓ┼cėŗöĄ
3.3 Modbusģfūh┐žųŲ╦┼Ę■ļŖÖCĘĮ░Ė
łD 5×ķLabview│╠ą“▓╔ė├Modbusģfūh┐žųŲ╦┼Ę■ļŖÖCĘ┤▐DĪŻModbus ģfūh╩Ūæ¬ė├ė┌ļŖūė┐žųŲŲ„╔ŽĄ─ę╗ĘN═©ė├šZčįŻ¼═©▀^┤╦ģfūh┐žųŲŲ„ŽÓ╗źų«ķg�����Īó┐žųŲŲ„║═Ųõ╦³įOéõų«ķg┐╔ęį═©ą┼���ĪŻ╦³ęčĮø│╔×ķę╗═©ė├╣żśIś╦£╩[2,3]���ĪŻModbusģfūhėąā╔ĘNé„▌ö─Ż╩ĮŻ║ASCII(American standard code for information interchange)╗“RTU(Remote terminal unit)�����Ż¼ā╔ĘNĘĮ╩ĮŠ∙ĒÜųĖČ©┤«┐┌═©ą┼ģóöĄŻ©╚ń▓©╠ž┬╩Ī󹯓×ĘĮ╩ĮĄ╚Ż®����ĪŻ╦┼Ę■ļŖÖCŅAŽ╚įOČ©ęįŽ┬ģóöĄŻ║šŠ╠¢Ż║1����Ż╗é„▌ö─Ż╩ĮŻ║RTU�Ż╗öĄō■╬╗Ż║8Ż╗ąŻ“ׯ║┼╝ąŻ“×���Ż╗═Żų╣╬╗Ż║1Ż╗═©ėŹ│¼ĢrŻ║5000ms�Ż╗┤«┐┌╠¢Ż║Com4����ĪŻ▓óīóļŖÖCā╚▓┐╝─┤µŲ„20B(16▀MųŲ)╬╗ų├įOČ©×ķ├³┴Ņ▌ö╚ļĘ┤Ž“┐žųŲŻ¼╝┤┤╦╝─┤µŲ„ūā╗»Ģr(╝┤ė╔106ūā×ķ006�����Ż¼╗“š▀ė╔006ūā×ķ106)ļŖÖCĘ┤▐D���Ż╗╚▒╩Ī×ķ106Ż¼ļŖÖC░┤Ž╚ųĖČ©ĘĮŽ“▀\ąą���ĪŻłD 5ųą│╠ą“╩ūŽ╚╠ß╚Īā╚▓┐╝─┤µŲ„20B╬╗ų├Ą─«öŪ░ųĄŻ¼═©▀^┼cĮoČ©ųĄī”▒╚┼ąöÓ║¾į┘▌ö╚ļą┬ųĄ��Ż¼Å─Č°īŹ¼FļŖÖCĘ┤▐DĄ─▓┘ū„�ĪŻ
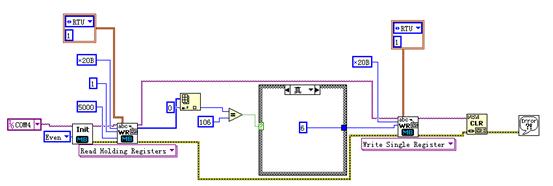
5 Modbusģfūh┐žųŲļŖÖCĘ┤▐D
3.4 śOŽ▐╬╗ų├Ę┤▐D▒ŻūoĘĮ░Ė
į┌ļŖÖCīŹļH▀\ąąųą▓╔ė├ā╔éĆ╣Ō┴┴Ą─Įī┘ĶFŲ¼ė|│÷░l╣ŌļŖķ_ĻPŻ¼ė╔ė┌ĶFŲ¼Ą─īÆČ╚║═ļŖÖCæTąį����Ż¼ļŖÖC═∙═∙ę¬│¼▀^ĶFŲ¼ā╚é╚▀ģŠēę╗▓┐Ęų║¾į┘ł╠ąąĘ┤▐D▓┘ū„Ż¼ļŖÖCĘ┤▐D│§Ų┌╣ŌļŖķ_ĻP╚į╠Äė┌Ą═ļŖŲĮ�����Ż¼▀@śOęūūī│╠ą“šJ×ķļŖÖCęčĮøĄĮ▀_┴Ēę╗éĆĮńŽ▐╬╗ų├���Ż¼Č°įņ│╔ļŖÖCį┌ę╗éĆśOŽ▐╬╗ų├ĖĮĮ³Ę┤Å═▀\ąą�Ż¼▓╗─▄š²│Ż╣żū„ĪŻłD 6×ķ│╠ą“ą┬į÷╝ėĄ─śOŽ▐╬╗ų├Ę┤▐D▒Żūo╣”─▄��ĪŻ╝┤į┌ļŖÖC▀\ąąĄĮśOŽ▐╬╗ų├║¾��Ż¼ĻPķ]NIöĄō■▓╔╝»╣”─▄2├ļ�����Ż¼2├ļ║¾öĄō■▓╔╝»į┘┤╬ķ_åóŻ¼Č°┤╦Ģr╣ŌļŖķ_ĻPęčĮø▀hļxė|░lĶFŲ¼����Ż¼▓╗Ģ■į┘┤╬░l╔·ęį╔Žå¢Ņ}�����ĪŻ
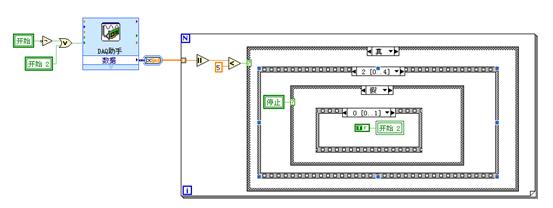
6 śOŽ▐╬╗ų├Ę┤▐D▒Żūo
4Īó▄ø╝■īŹ¼F
4.1 ╚╦ÖCĮ╗╗źĮń├µ
╚╦ÖCĮ╗╗źĮń├µŠÄ▌ŗĄ─┐╔ęŖ╝┤┐╔Ą├╩ŪLaviewĄ─ę╗éĆųžę¬Ą─ā×ä▌[4]�ĪŻLabviewĄ─Ū░├µ░Õ░³║¼┤¾┴┐ą╬Ž¾▒ŲšµĄ─┐ž╝■��Ż¼ė├æ¶▀Ć┐╔ęįäōĮ©ūįČ©┴x┐ž╝■ĪŻŪ░├µ░ÕĄ─┤░┐┌ą╬╩Į┐╔ęįęį▓╗═¼Ą─ĘĮ╩Į’@╩ŠęįØMūŃ▓╗═¼Ą─ąĶŪ¾�Ż¼ė├æ¶┐╔ęį═©▀^░┤Ōo���Īóī”įÆ┐“�Īó┬Ģę¶����Īó▓╦å╬╝░µI▒P▌ö╚ļĄ╚▓╗═¼ĘĮ╩Į┼c│╠ą“▀MąąĮ╗╗ź���ĪŻłD 7×ķ│╠ą“įOėŗĮń├µ����Ż¼ŲõųąŪÕ┴Ń░┤Ōo┐╔ęįīó«öŪ░┤╬öĄÜw┴ŃŻ╗░┤Ž┬įOČ©░┤Ōoīóėąę╗éĆī”įÆ┐“ÅŚ│÷Ż¼ė├æ¶┐╔ęį═©▀^µI▒P▌ö╚ļę¬Ū¾Ą─裣h┤╬öĄ����Ż╗į┘░┤Ž┬ķ_╩╝░┤Ōo│╠ą“īóķ_╩╝▀\ąą�����Ż¼═¼Ģrķ_╩╝░┤Ōoīó▒Ż│ų░┤Ž┬ĀŅæBŻ¼ķ_╩╝├³┴Ņūā×ķĢ║═Ż╣”─▄Ż¼┐╔ęįļSĢr░┤Ž┬Ģ║═Ż│╠ą“��Ż╗═Żų╣░┤Ōoīó═╦│÷š¹éĆ│╠ą“����ĪŻ
 7 ōQō§ŚU─═Š├įć“×┼_╚╦ÖCĮ╗╗źĮń├µ 7 ōQō§ŚU─═Š├įć“×┼_╚╦ÖCĮ╗╗źĮń├µ
4.2 ╬┤üĒöUš╣─▄┴”
¼Fį┌įOėŗĄ─ĘĮ░ĖāHØMūŃ─═Š├įć“ץ─裣h┤╬öĄę¬Ū¾║═ųĖČ©╦┘Č╚(═©▀^╦┼Ę■ļŖÖC)Ą─ģóöĄįOČ©Ż¼═©▀^ļŖē║║═ļŖ┴„é„ĖąŲ„īóļŖÖC▀\ąąļŖ┴„ļŖē║ą┼╠¢▐Dūā×ķ─ŻöMļŖē║ą┼╠¢▌ö╚ļĄĮNI-6251▓╔╝»Ū░Č╦Ż¼▓óį┌▄ø╝■ųąįOČ©ŽÓæ¬Ą─ōQ╦ŃģóöĄ���Ż¼╝┤┐╔īŹ¼Fī”ļŖÖCģóöĄĄ─īŹ╩®▒O┐žĪŻį┌ęį╔ŽŲĮ┼_╔ŽĄ─Į©┴ó╗∙ĄA╔ŽŻ¼┐╔▒M┐ņĄ─┤ŅĮ©ęį╔ŽŲĮ┼_,▓óĮ©┴óöĄō■▒Ż┤µ╝░ł¾Š»╣”─▄ĪŻ
5ĪóĮYšō
▒Š╬─═©▀^╣ŌļŖķ_ĻP░l│÷─ŻöMļŖē║ą┼╠¢Ż¼NIöĄō■▓╔╝»┐©▓╔╝»ļŖē║ą┼╠¢▓ó▌ö╚ļĄĮ╔Ž╬╗ÖCŻ¼╔Ž╬╗ÖCųą▀\ąą╩╣ė├Labview▄ø╝■ŠÄųŲĄ─╚╦ÖCĮė┐┌Įń├µ╝░öĄō■╠Ä└Ē│╠ą“����Ż¼Ė∙ō■┼ąöÓĮY╣¹═©▀^Modbusģfūh┐žųŲĮ╗┴„╦┼Ę■ļŖÖCīŹ¼F═∙Å═äėū„���Ż¼ūŅ║¾į÷╝ėśOŽ▐╬╗ų├ļŖÖCĘ┤▐D│╠ą“�����Ż¼ĮŌøQļŖÖC▀\ąą▀^│╠ųą│÷¼FĄ─śOŽ▐╬╗ų├┐žųŲ▓▀┬į╩¦ą¦Ą─å¢Ņ}�ĪŻīŹ█`ūC├„▀@ĘN┤ŅĮ©Ą─įć“×┼_Ą─╝╝ąg┬ĘŠĆ╝░┐žųŲ▓▀┬į╩Ū┐╔ąąĄ─�Ż¼═¼Ģr▀@ę▓╩Ūę╗ĘNė├▌^×ķ═©ė├ĘĮĘ©��Ż¼▓╗āH─▄ØMūŃōQō§ŚU─═Š├įć“ץ─ę¬Ū¾���Ż¼ī”Ųõ╦¹┴Ń▓┐╝■─═Š├įć“×┼_Ą─ķ_░lę▓ėąģó┐╝ęŌ┴x����ĪŻ
|

