š¬ę¬Ż║▒Š╬─ĮķĮB┴╦S120“īäėė└┤┼═¼▓ĮļŖÖCį┌ļŖ╠▌ųąĄ─æ¬ė├Ż¼ĻU╩÷┴╦ļŖ╠▌┐žųŲŽĄĮyĄ─ĮM│╔╝░╠ž³cŻ¼S120“īäėė└┤┼═¼▓ĮļŖÖCė├ė┌ļŖ╠▌╠ß╔²Ą─š{įćĘĮĘ©ĪŻļŖ╠▌ė└┤┼═¼▓ĮļŖÖC╩╣ė├S120“īäėŠ▀ėą┴╝║├Ą─äėņoæB╠žąįŻ¼ØMūŃŽĄĮyĄ─ę¬Ū¾Ż¼į┌īŹļHæ¬ė├ųą╚ĪĄ├┴╦┴╝║├Ą─ą¦╣¹ĪŻ
ĻPµIį~Ż║ė└┤┼═¼▓ĮļŖÖC S120 ļŖ╠▌“īäė ╩Ė┴┐
Abstract: The application of permanent magnet synchronous motor drive by S120 in elevator is introduced in this paper, describes the composition and characteristics of the elevator control system, the debugging method for elevator lifting drive by S120. Elevator permanent magnet synchronous motor using the S120 driver has good dynamic and static characteristics, to meet the requirements of the system, and achieved good results in practical application.
Key Words: PMSM S120 Elevator drive Vector
ę╗Īó╣½╦Š║åĮķ
ĮŁ╠K╬„Ą┬ļŖ╠▌╣½╦Š╣½╦Šų„ę¬Å─╩┬Ė„ŅÉ│╦┐═ļŖ╠▌Īóė^╣ŌļŖ╠▌ĪóĘ÷╠▌Īó▌džøļŖ╠▌Īóäe╩¹ļŖ╠▌Ą╚čą░lĪóįOėŗĪóųŲįņĪóõN╩█Īó░▓čb╝░ŠSą▐Ę■䚥─īŻśI╗»¼F┤·╗»Ų¾śIŻ¼ę▓╩Ū╬„ķTūė╣½╦Šį┌ļŖ╠▌ąąśIųžę¬Ą─æ┬į║Žū„╗’░ķĪŻ╬„Ą┬ļŖ╠▌ę╗ų▒│½ī¦┘|┴┐Ą┌ę╗Ą─└Ē─ŅŻ¼▓óų┬┴”ė┌▓╗öÓ╝╝ągäōą┬Ż¼ų▓Į│╔×ķļŖ╠▌ąąśIā╚Š▀ėą╝╝ągŽ╚ī¦Ą─ÅŖ┤¾ĖéĀÄ┴”Ų¾śIĪŻ┐═æ¶įŁŽ╚╩╣ė├╬„═■║═╩®─═Ą┬Ą─ūāŅlŲ„“īäėļŖ╠▌ų„╠ß╔²ė└┤┼═¼▓ĮļŖÖCŻ¼┐═æ¶×ķ┴╦╠ßĖ▀ūį╔Ē«aŲĘĄ─ĖéĀÄ┴”Ż¼ŽŻ═¹╩╣ė├╬„ķTūėūāŅlŲ„“īäėļŖ╠▌ų„╠ß╔²ļŖÖCĪŻ
Č■ĪóŽĄĮyĄ─╣żū„įŁ└Ē╝░ĮM│╔▓┐Ęų
1ĪóŽĄĮyĮM│╔▓┐Ęų
ļŖ╠▌╩Ūę╗ĘNęįļŖäėÖC×ķäė┴”Ą─┤╣ų▒╔²ĮĄÖCŻ¼čbėąŽõĀŅĄ§┼ōŻ¼ė├ė┌ČÓīėĮ©ų■│╦╚╦╗“▌d▀\žø╬’ĪŻęĘę²└Kā╔Č╦Ęųäe▀Bų°▐IĹ║═ī”ųžŻ¼└p└@į┌ęĘę²▌å║═ī¦Ž“▌å╔ŽŻ¼ęĘę²ļŖäėÖC═©▀^£p╦┘Ų„ūā╦┘║¾Ä¦äėęĘę²▌å▐DäėŻ¼┐┐ęĘę²└K┼cęĘę²▌å─”▓┴«a╔·Ą─Ā┐ę²┴”Ż¼īŹ¼F▐IĹ║═ī”ųžĄ─╔²ĮĄ▀\äėŻ¼▀_ĄĮ▀\▌ö─┐Ą─ĪŻ
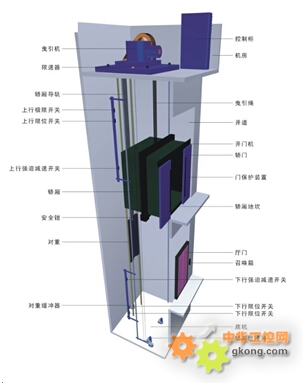
ļŖ╠▌ŽĄĮyĮM│╔Ż║
ęĘę²ŽĄĮyŻ║ęĘę²ŽĄĮyĄ─ų„ę¬╣”─▄╩Ū▌ö│÷┼cé„▀fäė┴”Ż¼╩╣ļŖ╠▌▀\ąąĪŻęĘę²ŽĄĮyų„ę¬ė╔ęĘę²ÖCĪóęĘę²õōĮz└KŻ¼ī¦Ž“▌åŻ¼Ę┤└K▌åĮM│╔ĪŻ
ī¦Ž“ŽĄĮyŻ║ī¦Ž“ŽĄĮyĄ─ų„ę¬╣”─▄╩ŪŽ▐ųŲ▐IĹ║═ī”ųžĄ─╗Ņäėūįė╔Č╚Ż¼╩╣▐IĹ║═ī”ųžų╗─▄čžų°ī¦▄ēū„╔²ĮĄ▀\äėĪŻī¦Ž“ŽĄĮyų„ę¬ė╔ī¦▄ēŻ¼ī¦čź║═ī¦▄ē╝▄ĮM│╔ĪŻ
▐IĹŻ║▐IĹ╩Ū▀\╦═│╦┐═║═žø╬’Ą─ļŖ╠▌ĮM╝■Ż¼╩ŪļŖ╠▌Ą─╣żū„▓┐ĘųĪŻ▐IĹė╔▐IĹ╝▄║═▐IĹ¾wĮM│╔ĪŻ
ķTŽĄĮyŻ║ķTŽĄĮyĄ─ų„ę¬╣”─▄╩ŪĘŌūĪīėšŠ╚ļ┐┌║═▐IĹ╚ļ┐┌ĪŻķTŽĄĮyė╔▐IĹķTŻ¼īėķTŻ¼ķ_ķTÖCŻ¼ķTµičbų├ĮM│╔ĪŻ
ųž┴┐ŲĮ║ŌŽĄĮyŻ║ŽĄĮyĄ─ų„ę¬╣”─▄╩ŪŽÓī”ŲĮ║Ō▐IĹųž┴┐Ż¼į┌ļŖ╠▌╣żū„ųą─▄╩╣▐IĹ┼cī”ųžķgĄ─ųž┴┐▓Ņ▒Ż│ųį┌Ž▐Ņ~ų«ā╚Ż¼▒ŻūCļŖ╠▌Ą─ęĘę²é„äėš²│ŻĪŻŽĄĮyų„ę¬ė╔ī”ųž║═ųž┴┐čaāöčbų├ĮM│╔ĪŻ
ļŖ┴”═ŽäėŽĄĮyŻ║ļŖ┴”═ŽäėŽĄĮyĄ─╣”─▄╩Ū╠ß╣®äė┴”Ż¼īŹąąļŖ╠▌╦┘Č╚┐žųŲĪŻļŖ┴”═ŽäėŽĄĮyė╔ęĘę²ļŖäėÖCŻ¼╣®ļŖŽĄĮyŻ¼╦┘Č╚Ę┤üčbų├Ż¼ļŖäėÖCš{╦┘čbų├Ą╚ĮM│╔ĪŻ
ļŖÜŌ┐žųŲŽĄĮyŻ║ļŖÜŌ┐žųŲŽĄĮyĄ─ų„ę¬╣”─▄╩Ūī”ļŖ╠▌Ą─▀\ąąīŹąą▓┘┐v║═┐žųŲĪŻļŖÜŌ┐žųŲŽĄĮyų„ę¬ė╔▓┘┐včbų├Ż¼╬╗ų├’@╩Ščbų├Ż¼┐žųŲŲ┴(╣±)Ż¼ŲĮīėčbų├Ż¼▀xīėŲ„Ą╚ĮM│╔ĪŻ
░▓╚½▒ŻūoŽĄĮyŻ║▒ŻūCļŖ╠▌░▓╚½╩╣ė├Ż¼Ę└ų╣ę╗Ūą╬Ż╝░╚╦╔Ē░▓╚½Ą─╩┬╣╩░l╔·ĪŻė╔ļŖ╠▌Ž▐╦┘Ų„Īó░▓╚½ŃQĪóŖA└KŲ„ĪóŠÅø_Ų„Īó░▓╚½ė|░ÕĪóīėķTķTµiĪóļŖ╠▌░▓╚½┤░ĪóļŖ╠▌│¼▌dŽ▐ųŲčbų├ĪóŽ▐╬╗ķ_ĻPčbų├ĮM│╔ĪŻ
▒Š╬─ų„ę¬ĮķĮBļŖ┴”═ŽäėŽĄĮy
2ĪóļŖ┴”═ŽäėŽĄĮy
ļŖ┴”═ŽäėŽĄĮyė╔ęĘę²ļŖäėÖCŻ¼╣®ļŖŽĄĮyŻ¼╦┘Č╚Ę┤üčbų├Ż¼ļŖäėÖCš{╦┘čbų├Ą╚ĮM│╔ĪŻ
ęĘę²ŽĄĮyų„ꬓīäė▓┐ĘųęĘę²ÖC┐╔Ęų×ķėą²X▌åęĘę²ÖC║═¤o²X▌åęĘę²ÖCĪŻ
ėą²X▌åęĘę²ÖCŻ║ė╔ļŖäėÖCĪóųŲäėŲ„Īó£p╦┘ŽõĪó▒P▄ćčbų├╝░Ąūū∙Ą╚ĮM│╔Ż¼▀Ćėąą²▐DŠÄ┤aŲ„Īó¤ß▒ŻūoĪóųŲäėŲ„ķ]║Ž┤_šJķ_ĻPĪóĮėŠĆčbų├ĪŻų„ę¬ÖCą═×ķ╬ü▌å╬üŚUé„äėęĘę²ÖCĪŻ
¤o²X▌åęĘę²ÖCŻ║ė╔ļŖäėÖCĪóųŲäėŲ„Īó▒P▄ćčbų├╝░Ąūū∙Ą╚ĮM│╔Ż¼▀Ćėąą²▐DŠÄ┤aŲ„Īó¤ß▒ŻūoĪóųŲäėŲ„ķ]║Ž┤_šJķ_ĻPĪóĮėŠĆčbų├ĪŻų„ę¬ÖCą═×ķė└┤┼═¼▓Į¤o²X▌åęĘę²ÖCĪŻ


ėą²X▌åé„äėęĘę²ÖC ė└┤┼═¼▓Į¤o²X▌åęĘę²ÖC
ė└┤┼═¼▓ĮļŖÖC“īäėĄ─¤o²X▌åęĘę²ÖCŻ¼ė╔ė┌▓╔ė├¤o²X▌åęĘę²╝╝ągŻ¼╩Īģs┴╦é„ĮyĄ─╬ü▌å╬üŚU£p╦┘Ų„Ż¼╩╣ÖCĘ┐įļę¶┤¾┤¾ĮĄĄ═Ż¼▌^ėą²X▌å«aŲĘ┐╔£pąĪįļę¶10ĘųžÉęį╔ŽŻ╗¤oąĶØÖ╗¼ė═Ż¼Ė∙│²┴╦ė═╬█╚ŠŻ¼Ė³Ę¹║ŽŁh▒Żę¬Ū¾ĪŻė└┤┼═¼▓ĮļŖäėÖC▐Dūėė╔Ė▀ąį─▄ė└┤┼¾wśŗ│╔Ż¼¤oäŅ┤┼ļŖ┴„Ż¼┤¾┤¾Ąž╠ßĖ▀ļŖäėÖCĄ─▀\ąąą¦─▄ĪŻė╔ė┌╬ü▌å╬üŚUĄ─ÖCąĄé„▀fą¦┬╩▒╚▌^Ą═Ż¼╦∙ęįė└┤┼═¼▓Į¤o²X▌å“īäėŽĄĮy▒╚╬ü▌å╬üŚUé„äėŽĄĮyŠ▀ėąĖ³Ė▀Ą─ą¦┬╩Ż¼ĮĄĄ═ļŖ┴”║──▄ĪŻį┌░▓╚½ĘĮ├µŻ¼ę“×ķŲõĮYśŗ║åå╬ĪóŠ▀ėąäéąįų▒▌SųŲäėĄ╚╠ž³cŻ¼į┌╠ß╣®╚½Ģr╔ŽŽ┬ąą│¼╦┘▒Żūo╣”─▄Ą─═¼ĢrŻ¼┐╔└¹ė├ė└┤┼═¼▓ĮļŖäėÖCĄ─Ę┤Ž“░lļŖĄ─╠ž³cŻ¼×ķļŖ╠▌ŽĄĮy┼c│╦┐═╠ß╣®ČÓīė▒ŻūoĪŻį┌æ¬ė├ĘĮ├µŻ¼ę“×ķė└┤┼═¼▓ĮęĘę²ÖC═Ōą═Ą─ąĪą═╗»╝░▒Īą═╗»╠ž³cŻ¼╩╣ļŖ╠▌┼õų├┼cĮ©ų■╬’ķgš¹║Ž┐šķgĄ─┤Ņ┼õąį┤¾┤¾╠ß╔²Ż¼×ķĮ©ų■įOėŗĤ╠ß╣®Ė³┤¾Ą─ÅŚąįįOėŗ┐šķgŻ¼═¼Ģrę▓ķgĮėĄ─Ė─╔Ų┴╦╚╦ī”Į©ų■╬’┐šķgĄ─╩╣ė├┬╩┼c╩╣ė├┘|┴┐ĪŻ¼Fį┌╩ął÷╔Žų„┴„Ą─┤╣ų▒ļŖ╠▌Č╝╩╣ė├ė└┤┼═¼▓ĮęĘę²ÖCĪŻ
ę“×ķ╔Ž╩÷ė└┤┼═¼▓Į¤o²X▌åęĘę²ÖCŽÓī”ė┌é„ĮyĄ─ėą²X▌åé„äėęĘę²ÖCĄ─ā׳cŻ¼Į³ą®─ĻüĒė└┤┼═¼▓Į¤o²X▌åęĘę²ÖCį┌ļŖ╠▌ąąśI═ŲÅV║▄┐ņĪŻ─┐Ū░ć°ā╚▌d╚╦ļŖ╠▌ųąŻ¼¤o²X▌åęĘę²ÖCĄ─╩╣ė├┬╩ęč▀_60%ū¾ėęŻ¼ć°ā╚─┐Ū░Ą─┐═╠▌─Ļ«a┴┐×ķ20╚f┼_Ż¼¤o²X▌åęĘę²ÖCĄ──ĻõN┴┐▀_12╚f┼_Ż¼┐é«aųĄėą20ā|ū¾ėęĪŻ
╚²ĪóļŖ┴”═ŽäėŽĄĮy┐žųŲĘĮ░Ė╝░š{įć
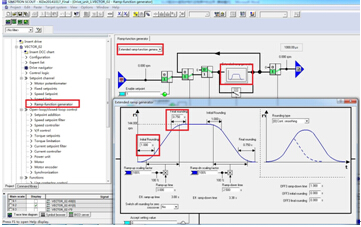
1Īó ļŖÖCģóöĄ╝░┼õųžĄ─▀xō±
ļŖ╠▌ęĘę²ÖC▀xė├ĮŁ╠K╬„Ą┬ļŖ╠▌ėąŽ▐╣½╦Š╔·«aĄ─¤o²X▌åė└┤┼═¼▓ĮļŖ╠▌ęĘę²ÖCĪŻ
ų„ę¬ļŖÖCģóöĄŻ║ęĘę²▌åų▒ÅĮ 400mm Ņ~Č©ļŖ┴„ 25.7A
Ņ~Č©╦┘Č╚ 1.5m/s Ņ~Č©╣”┬╩ 11.5Kw
Ņ~Č©žō▌d 1150Kg Ņ~Č©┼żŠž 765N
Ņ~Č©ļŖē║ 380V æęÆņĘĮ╩Į 2/1
Ņ~Č©Ņl┬╩ 24Hz ╣żū„ųŲ S5 40%
ūóŻ║ S5╣żū„ųŲ ░³└©ļŖųŲäėĄ─öÓ└mų▄Ų┌╣żū„ųŲŻ║░┤ę╗ŽĄ┴ąŽÓ═¼Ą─╣żū„ų▄Ų┌▀\ąąŻ¼├┐ę╗ų▄Ų┌░³└©ę╗Č╬ŲäėĢrķgĪóę╗Č╬║ŃČ©žō▌d▀\ąąĢrķgĪóę╗Č╬┐ņ╦┘ļŖųŲäėĢrķg║═ę╗Č╬öÓ─▄═Ż▐DĢrķgĪŻ
ļŖ╠▌┼õųžĄ─ėŗ╦ŃŻ¼┼õųž╩Ūę╗ĘNŲĮ║Ō¾wŻ¼Ųõ┘|┴┐æ¬▀xō±┤¾╝sĖ·ļŖ╠▌Ĺ(░³└©ŲĮŠ∙╦■▌dĄ─│╦┐═)Ą─┘|┴┐ŽÓĄ╚ĪŻ«öŲäėļŖäėÖCĢrŻ¼╦³ų╗ąĶę¬╣®Įo╠ß╔²ČÓ┤Ņ▌dĄ─│╦┐═╔Ž╔²╗“╔┘┤Ņ▌dĄ─│╦┐═Ž┬ĮĄĄ─äė┴”ĪŻŲõėÓĄ─ųž┴”ė╔┼õųžüĒŲĮ║ŌĪŻ░┤ššć°╝ęś╦Ż¼│÷¼FļŖ╠▌└’├µū°ØM40%-50%Ņ~Č©▌d║╔Ą─╚╦Ą─Ė┼┬╩ūŅ┤¾Ż¼▀@śėūŅĮøØ·Ą─ŪķørŽ┬æ¬įō╩Ūī”ųžĄ─ųž┴┐Ą╚ė┌▐IĹĄ─ųž┴┐╝ė╔Ž╦³Ņ~Č©▌d║╔40%-50%Ą─ųž┴┐ūŅ║├ĪŻ£p╚ź▐IĹųž┴┐Ą─ėąą¦┼õųžš╝Ņ~Č©▌d║╔Ą─▒╚└²ę▓ĮąļŖ╠▌Ą─ŲĮ║ŌŽĄöĄĪŻ▒ŠśėÖCųąĄ─äėŲĮ║ŌŽĄöĄ╝s×ķ45%Ż¼ŪęæęÆņĘĮ╩Į×ķ2/1Ż¼ätŻ║
š²│Ż▀\ąąĢrĄ─ūŅ┤¾┼żŠžM░┤šš│¼▌d10%üĒėŗ╦ŃŻ¼
M = (1.1-ψ) × QD1g/2r
= (1.1-0.45) × 1150 × 0.4 × 9.8/4
= 732N
╩ĮųąŻ¼ęĘę²▒╚ r=2, Q×ķ▐IĹ▌dųž┴┐Ż¼D1×ķęĘę²▌åų▒ÅĮŻ¼D1=400mmŻ¼ ψ×ķŲĮ║ŌŽĄöĄŻ¼
ψ=0.45ĪŻ
2ĪóļŖ┴”═ŽäėŽĄĮyĘĮ░Ė
ęĘę²ÖC“īäėŽĄĮyĄ─ę¬Ū¾Ż║
1Īó“īäėė└┤┼═¼▓ĮļŖÖCŻ¼īŹ¼Fķ]Łh╩Ė┴┐┐žųŲĪŻ
2Īó╬„Ą┬ļŖ╠▌ė└┤┼═¼▓ĮļŖÖCĄ─ŠÄ┤aŲ„×ķ║ŻĄ┬Øh ERN 1387Ż¼į÷┴┐╩ĮŠÄ┤aŲ„ SIN/COS (1 Vpp) ĪŻ
3Īóę¬Ū¾ūāŅlŲ„ĦEncoder Simulation TTL▓ŅĘų 5V ▌ö│÷ą┼╠¢Ż¼┤╦ą┼╠¢▌ö│÷ĄĮļŖ╠▌┐žųŲų„░Õ▒O┐žļŖ╠▌īŹļH╦┘Č╚ĪŻ
4Īó×ķ▒ŻūCļŖ╠▌│╦ū°╩µ▀mąįŻ¼╦┘Č╚Łh▒╚└²ĘeĘųĖ∙ō■īŹļH╦┘Č╚ŪąōQĪŻ
5ĪóūāŅlŲ„├}īÆš{ųŲŅl┬╩ąĶę¬8KHz,▀_ĄĮĮĄĄ═ļŖÖC▀\ąąįļ궥──┐Ą─ĪŻ
╗∙ė┌╬„ķTūėS120┐╔ęį╠ß╣®ęįŽ┬ā╔éĆĘĮ░ĖŻ¼
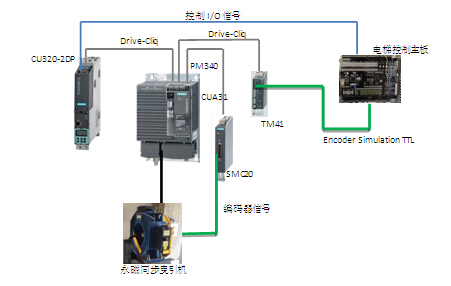
ĘĮ░Ė1Ż║S120 CU320-2DP+CUA31+PM340+TM41+SMC20
ĘĮ░Ė2Ż║S120 CU310-2DP+SMC20+PM340+ŠÄ┤aŲ„ą┼╠¢▐DōQŲ„
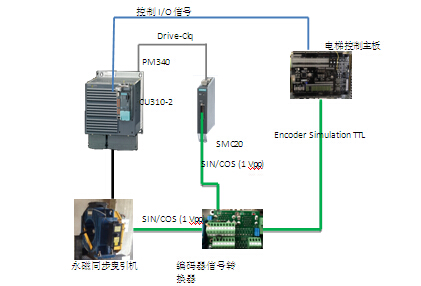
ĘĮ░Ė1ųąŻ¼╬„ķTūė╠ß╣®┴╦š¹éĆļŖ┴”═ŽäėŽĄĮyŻ¼S120×ķ┴╦īŹ¼FūāŅlŲ„TTL─ŻöMą┼╠¢Ą─▌ö│÷Ż¼▀xō±┴╦TM41▀x╝■Ż¼ŪęąĶę¬▀x┼õCU320-2DPū÷×ķūāŅlŲ„Ą─┐žųŲå╬į¬ĪŻŽÓī”ė┌ĘĮ░Ė1Ż¼ĘĮ░Ė2Ą─ā׳c╩ŪęĘę²ÖC“īäėūāŅlŲ„ĮYśŗ║åå╬Ż¼į┌īŹ¼F═Žäė╣”─▄Ą─═¼ĢrŻ¼┤¾┤¾╣Ø╩Ī┴╦ęĘę²═¼▓ĮļŖÖC“īäėĄ─│╔▒ŠĪŻ▀xė├┴╦┐╔┐┐Ą─Ą┌╚²ĘĮŠÄ┤aŲ„▐DōQŲ„Ż¼ūāŅlŲ„ų╗žōž¤“īäėė└┤┼═¼▓ĮļŖÖCīŹ¼Fķ]Łh╩Ė┴┐╦┘Č╚┐žųŲŻ¼TTL▓ŅĘų5Vą┼╠¢═©▀^ŠÄ┤aŲ„ą┼╠¢▐DōQŲ„ų▒Įė▌ö│÷ĄĮļŖ╠▌┐žųŲų„░ÕŻ¼š{įć║åå╬ĪŻ
3ĪóļŖ┴”═ŽäėŽĄĮy▀xą═
ę“×ķį┌ļŖ╠▌╠ß╔²ŽĄĮyųąŻ¼ė├ė┌ļŖ╠▌Ą─ė└┤┼¤o²X═¼▓ĮęĘę²ÖCĖ∙ō■ļŖ╠▌ąąśIĮø“×ų▒Įė╠ß╣®žō▌dųž┴┐║═▀\ąąŠĆ╦┘Č╚ĪŻĻPė┌ūāŅlŲ„Ż¼ąĶę¬ī”æ¬═¼▓ĮļŖÖC╣”┬╩Ą─▀xō±ųž▌d╣”┬╩Ż¼┐═æ¶═©▀^ėŗ╦Ń╠ß╣®┴╦ūāŅlŲ„╣”┬╩║═ųŲäėļŖūĶ╣”┬╩ĪŻĄ½╩Ū×ķ┴╦▀_ĄĮĮĄĄ═ļŖÖC▀\ąąįļ궥──┐Ż¼ūāŅlŲ„Ą─├}īÆš{ųŲŅl┬╩ąĶę¬į÷╝ėĄĮ8KHzŻ¼ę“┤╦ąĶę¬┐╝æ]īŹļHūāŅlŲ„ę“├}īÆš{ųŲŅl┬╩į÷┤¾Č°įņ│╔Ą─▌ö│÷ļŖ┴„ĮĄ╚▌ĪŻ«öūāŅlŲ„Ą─├}īÆš{ųŲŅl┬╩ąĶę¬į÷╝ėĄĮ8KHzĢrŻ¼ūāŅlŲ„į╩įSĄ─│ų└m▌ö│÷ļŖ┴„ĮĄ╚▌ĄĮŅ~Č©Ą─70%ĪŻ
PM340─ŻēKą═╣”┬╩─ŻēKĄ─ĮĄŅ~╠žąįŪ·ŠĆ
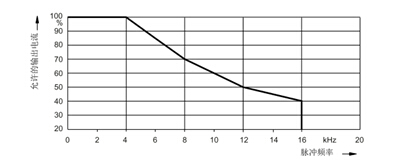
FSA ║═ FSE ą═Ż║ “├}ø_Ņl┬╩-▌ö│÷ļŖ┴„”║»öĄłD
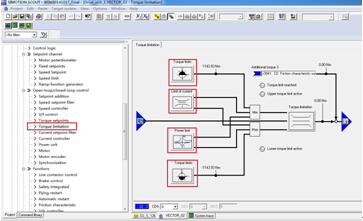
┐═æ¶ų„ę¬▀xō±Ą┌╚²ĘĮųŲäėļŖūĶŻ¼į┌S120╣”┬╩å╬į¬PM340ėąī”ųŲäėļŖūĶūĶųĄĄ─ę¬Ū¾Ż¼╝┤┐═æ¶▀xō±Ą─ųŲäėå╬į¬ūĶųĄ▓╗─▄ąĪė┌PM340╣”┬╩å╬į¬į╩įSĄ─ūŅąĪūĶųĄę¬Ū¾Ż¼╚ń╣¹▀xō±Ą─ųŲäėå╬į¬ūĶųĄąĪė┌╣”┬╩å╬į¬į╩įSĄ─ūĶųĄŻ¼Ģ■ī¦ų┬PM340ā╚ų├Ą─ųŲäėå╬į¬ōpē─ĪŻ
4ĪóĄ┌╚²ĘĮė└┤┼═¼▓ĮļŖÖCĄ─š{įć╝░ā×╗»
┤┼śO╬╗ų├ūRäeŻ║
S120“īäėė└┤┼═¼▓ĮļŖÖCąĶę¬▀Mąą┤┼śO╬╗ų├ūRäe╣”─▄üĒ┤_Č©═¼▓ĮļŖÖCĄ─ļŖÜŌ┤┼śO╬╗ų├Ż¼į┌┤┼ł÷Č©Ž“┐žųŲųąąĶę¬įō╬╗ų├ĪŻ╦∙ęįī”ė┌Ħ╬┤ąŻ£╩ŠÄ┤aŲ„Ą─ļŖÖCŻ¼ų╗ąĶę¬▀Mąąę╗┤╬ąį┤┼śO╬╗ų├ūRäeŻ¼ŽÓ▒╚▌^┐═æ¶įŁŽ╚╩╣ė├╩®─═Ą┬ATV71L, ę“×ķATV71L▓╗─▄Įė╚ļŠÄ┤aŲ„C, Dą┼╠¢Ż¼├┐┤╬ūāŅlŲ„╔ŽļŖĄ┌ę╗┤╬▀\ąąĢ■ūįäėł╠ąą┤┼śO╬╗ų├ūRäeŻ¼Å─Č°ę²ŲļŖ╠▌«a╔·▌^┤¾Ą─šäėŻ¼ĮĄĄ═┴╦ļŖ╠▌Ą─╩µ▀mąįŻ¼Č°▒ŠśėÖCųąS120“īäė╔“Ļ¢╦{╣Ōė└┤┼═¼▓ĮļŖÖCŻ¼ŠÄ┤aŲ„×ķ║ŻĄ┬ØhERN1387Ż¼ ĦėąCŻ¼D ą┼╠¢Ż¼╦∙ęįų╗ąĶį┌ļŖ╠▌š{įćĢrł╠ąąę╗┤╬┤┼śO╬╗ų├ūRäeŻ¼ų«║¾▀\ąą▓╗Ģ■│÷¼FATV71LĄ─ŪķørŻ¼▒ŻūC┴╦ļŖ╠▌▀\ąąĄ─╩µ▀mąįĪŻ
┤┼śO╬╗ų├ūRäeų„ę¬▓Į¾EŻ║
1. ═©▀^ p1980 ▀xō±ę╗éĆūRäeĘĮĘ©
2. įOų├ p1990 = 1Ż¼åóäėę╗┤╬ąį┤┼śO╬╗ų├ūRäe
īŹļHĄ─┤┼śO╬╗ų├ūRäe▀^│╠Ż¼ļŖÖCų┴╔┘ą²▐D360®b
īŹļH┤┼śO╬╗ų├ūRäeĘĮĘ©æ¬ØMūŃęįŽ┬ča│õŚl╝■Ż║
▐D╦┘įOČ©ųĄ = 0 ╗“ņoų╣ĀŅæB
ļŖÖC─▄ē“ūįė╔ą²▐DŻ¼┤╣ų▒žō▌d├ōķ_
▒¦ķlįOų├Ż║
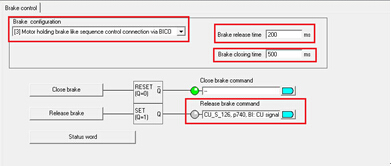
ļŖÖC▒¦ķlģóöĄįOų├
P1215=3: ļŖÖC▒¦ķl═¼Ēśą“┐žųŲŻ¼═©▀^ BICO ▀BĮėĪŻP1216 ļŖÖC▒¦ķl┤“ķ_ĢrķgŻ¼▒¦ķl═©ļŖ║¾Ż©┤“ķ_▒¦ķlŻ®Ż¼▐D╦┘/ ╦┘Č╚įOČ©ųĄį┌įōĢrķgā╚▒Ż│ų×ķ┴ŃŻ¼ų«║¾╩╣─▄▐D╦┘/ ╦┘Č╚įOČ©ųĄĪŻP1217 ļŖÖC▒¦ķlķ]║ŽĢrķg, į┌ł╠ąą OFF1 ╗“ OFF3ĪóĮo▒¦ķlöÓļŖŻ©ķ]║Ž▒¦ķlŻ®║¾Ż¼“īäėį┌įōĢrķg╚į╠Äė┌ķ]Łh┐žųŲųąŻ¼▐D╦┘/╦┘Č╚įOČ©ųĄ×ķ┴ŃŻ¼į┌įōĢrķgī├ØM║¾äh│²├}ø_ĪŻ╚ń╣¹įOų├Ą─ķ]║ŽĢrķg▒╚īŹļHķ]║ŽĢrķgČ╠Ż¼ät┐╔─▄Ģ■╩╣žō▌d╗¼┬õŻ╗Č°╚ń╣¹ķ]║ŽĢrķgįOĄ├╠½┤¾Ż¼┐žųŲķ]ŁhĢ■╩®╝ėĘ┤ū„ė├į┌▒¦ķl╔ŽŻ¼┐sČ╠▒¦ķl╩╣ė├ē█├³ĪŻ
▒¦ķl┐žųŲĢrą“
▐DŠžŽ▐ųŲŻ║
▐DŠžŽ▐ųĄ╩Ūį╩įSĄ─ūŅ┤¾▐DŠžŻ¼ßśī”ļŖÖCļŖäė▀\ąą║═╗žü▀\ąąįOų├▓╗═¼Ą─▐DŠžŽ▐ųĄŻ¼Ūęė╔▐DŠžŽ▐ųŲŻ¼ļŖ┴„įOų├║═╣”┬╩Ž▐ųŲ╣▓═¼øQČ©ĪŻąĶę¬┤_šJįOČ©Ą─╗žü╣”┬╩╩ŪʱØMūŃļŖÖC╗žü▀\ąąĪŻ
▐DŠžŽ▐ųŲ
ūāŅlŲ„┐žųŲą┼╠¢įOČ©Ż║
▒ŠśėÖCųąūāŅlŲ„╦┘Č╚ĮoČ©ųĄ═©▀^Č■▀MųŲ▀xō±Ą─╣╠Č©Ņl┬╩ĮoČ©īŹ¼FĪŻ
╣╠Č©Ņl┬╩ĮoČ©Č■▀MųŲ▀xō±
ūāŅlŲ„Ą─╣╩šŽą┼╠¢▌ö│÷ą┼╠¢▀BĮėĄĮļŖ╠▌┐žųŲų„░ÕŻ¼ę“×ķį┌ŽĄĮy╔ŽļŖĢrŻ¼ļŖ╠▌Ą─┐žųŲų„░ÕåóäėĢrķg▒╚ūāŅlŲ„Ģrķgę¬Č╠Ż¼«öūāŅlŲ„ø]ėą£╩éõ║├Ż¼ļŖ╠▌┐žųŲų„░Õ╠ßŪ░åóäėūāŅlŲ„Ż¼ėą┐╔─▄Ģ■ī¦ų┬ęŌ═Ō░l╔·Ż¼╦∙ęįąĶę¬╣╩šŽą┼╠¢▌ö│÷ą┼╠¢╚ĪĘ┤║¾░l╦═ĄĮļŖ╠▌┐žųŲų„░ÕĪŻ«öūāŅlŲ„┐žųŲå╬į¬š²│Ż▀\ąą║¾▓┼─▄░č╣╩šŽą┼╠¢╚ĪĘ┤░l╦═│÷╚źŻ¼╦∙ęįūāŅlŲ„į┌š²│Ż▀\ąąĄ─Ūķør▓┼Ģ■░l│÷│Ż1ą┼╠¢Ż¼«öūāŅlŲ„öÓļŖ╗“š▀ūāŅlŲ„╣╩šŽĢrŻ¼ļŖ╠▌┐žųŲų„░Õ▓╗─▄Įė╩šĄĮ▀@éĆ│Ż1ą┼╠¢Ż¼Š═šJ×ķūāŅlŲ„▓╗Š▀éõåóäėŚl╝■Ż¼š¹éĆļŖ╠▌ŽĄĮy¤oĘ©š²│Ż▀\ąąĪŻ
ļŖ╠▌▀\ąą╩µ▀mąįįOų├Ż║
×ķ┴╦ØMūŃ│╦┐═│╦ū°ļŖ╠▌Ģr╩µ▀mąįĄ─ę¬Ū¾Ż¼ąĶę¬═©▀^öUš╣ą▒Ų┬║»öĄ░l╔·Ų„║═▐D╦┘┐žųŲŲ„▀m┼õüĒīŹ¼FĪŻ
öUš╣Ą─ą▒▓©║»öĄ░l╔·Ų„╠ß╣®ļŖÖCåóäė╝ė╦┘▀^│╠ųąĄ─Ų╩╝łA╗Ī║═ĮY╩°łA╗ĪŻ¼īŹ¼F┴╦╦┘Č╚Ą─ŲĮĘĆ▀^Č╔Ż¼į┌ļŖ╠▌š¹éĆ╝ė£p╦┘▀^│╠ųąīŹ¼Fūā╝ė╦┘Č╚Ą─╣”─▄Ż¼į┌ļŖ╠▌åóäė╦▓ķg║═┐ņ╝ė╦┘ĄĮ▀_ĮoČ©╦┘Č╚ĢrŻ¼£pąĪ┴╦ļŖ╠▌▀\ąą╝ė╦┘Č╚Ż¼╠ßĖ▀┴╦ļŖ╠▌│╦ū°Ą─╩µ▀mąį,▒▄├Ō┴╦ļŖ╠▌Å─ņoų╣ĀŅæB═╗╚╗åóäė║═ļŖ╠▌╝ė╦┘ĄĮįOČ©╦┘Č╚ĢrĄ─ø_ō¶ĪŻ
Ħ│§╩╝║═ĮY╩°łA╗ĪĄ─ą▒▓©░l╔·Ų„
╦┘Č╚┐žųŲŲ„Kp_n/ Tn_n▀m┼õŻ¼╩ūŽ╚ļŖ╠▌åóäėĢrŻ¼ę“×ķļŖ╠▌╩Ū┤╣ų▒▌SŻ¼ąĶę¬▌^┤¾Ą─Kp_n║═▌^ąĪĄ─Tn_nŻ¼«öļŖ╠▌╦┘Č╚ūā┤¾ĢrŻ¼×ķ┴╦▒ŻūCļŖ╠▌Ą─╩µ▀mąįŻ¼ąĶ꬚{ąĪļŖÖC▀\ąąĄ─äėæBĒææ¬Ż¼ūī╦┘Č╚Łh╠žąįūā▄øŻ¼╝┤š{ąĪKp_n║═į÷┤¾Tn_nĪŻ╦┘Č╚┐žųŲŲ„Kp_n/ Tn_n▀m┼õīŹ¼F┴╦Ė∙ō■ļŖ╠▌▀\ąą╦┘Č╚ŪąōQ╦┘Č╚┐žųŲŲ„Kp_n/ Tn_nĄ─╣”─▄ĪŻŽÓī”ė┌╗∙ė┌ļŖ╠▌▀\ąą╦┘Č╚ŪąōQ╦┘Č╚┐žųŲŲ„KP_n/ Tn_nŻ¼S120╦┘Č╚┐žųŲŲ„KP_n/ Tn_n▀m┼õ╣”─▄Ė³╝ėņ`╗ŅŻ¼īŹ¼F┴╦Kp_n/ Tn_nĄ─ŲĮ╗¼š{š¹ĪŻ

╦┘Č╚┐žųŲŲ„Kp_n/ Tn_n▀m┼õ
ļŖ╠▌╠ß╔²Ą─ā×╗»Ż║
S120“īäėęĘę²═¼▓ĮļŖÖCŻ¼╩ūŽ╚▓╔ė├ P1910 ▀MąąļŖÖCöĄō■ūRäeŻ©ņoæB£y┴┐Ż®ĪŻ┐š▌dĢr▀MąąŠÄ┤aŲ„ūRäeĄ├ĄĮ┤┼śOŻ¼Ą├ĄĮP431ōQŽ“ĮŪŲ½ęŲŻ¼▓╗Įė╚ļžō▌dŻ¼═©▀^P1960▀xō±2Ż¼▀MąąÄ¦ŠÄ┤aŲ„Ą─ą²▐DÖz£yĄ├ĄĮĖ³£╩┤_Ą─’¢║═╠žąįŪ·ŠĆĪŻį┌ļŖÖCø]ėąĖ³ōQ╝░ŠÄ┤aŲ„░▓čbø]ėąęŲäėĄ─Ū░╠ߎ┬Ż¼┐╔ęįų▒Įėį┌P431ųą▌ö╚ļęčų¬Ą─┤┼śOōQŽ“ĮŪŲ½ęŲŻ¼▓╗ąĶę¬ųžą┬ū÷┤┼śOĮŪ▒µūRĪŻ
╗∙ė┌ų«Ū░Ą─ā×╗»£╩éõ╣żū„Ż¼Įė╚ļžō▌dŻ¼ęĘę²ÖCÆņ╔Ž▐IĹ║═┼õųžŻ¼Ė∙ō■ų«Ū░ļŖ╠▌┼õųžĄ─▀xō±Ż¼į┌▐IĹ┐šų├Ą─ŪķørŽ┬Ż¼ęĘę²ÖCĄ─ėąą¦žō▌d╝s×ķŅ~Č©žō▌dĄ─50%Ż¼╗∙▒Š▀_ĄĮ┴╦ļŖ╠▌▀\ąąĄ─ūŅ┤¾žō▌dŻ¼åóäėļŖ╠▌Ž┬ąąŻ¼ļŖÖC▀\ąąį┌ļŖäėĀŅæBŻ¼│÷¼F┴’▄ć¼FŽ¾Ż¼S120ł¾╣╩šŽF7412Ż©“īäėŻ║ōQŽ“ĮŪ│÷ÕeŻ®ĪŻĄ½į┌Įė╚ļžō▌dų«Ū░ČÓ┤╬▀Mąą┴╦┤┼śO╬╗ų├ūRäeŻ¼Ą├ĄĮĄ─P431ōQŽ“ĮŪŲ½ęŲ╗∙▒ŠŽÓ═¼Ż¼Ūęį┌ęĘę²ļŖÖC┐š▌dĢr┐╔ęįš²│Ż▀\ąąŻ¼╦∙ęį┐╔ęį┼┼│²╩Ūę“×ķōQŽ“ĮŪŲ½ęŲĮŪČ╚Õeš`Ą─įŁę“Ż¼Ė∙ō■╩ųāįĻPė┌F7412Ą─╣╩šŽšf├„ųą╠ߥĮ┐╔─▄╩Ū┐žųŲ╗ž┬Ęę“×ķģóöĄįOČ©Õeš`Č°▓╗ĘĆČ©ĪŻĮY║ŽŲõųą┴’▄ćĢrĄ─TracełDųąĄ─╦┘Č╚║═┼żŠžĄ─ūā╗»Ż¼░l¼F╦┘Č╚ŁhĄ─Ēææ¬▀_▓╗ĄĮąį─▄ę¬Ū¾ĪŻ═©▀^ų▓Įį÷┤¾KP_n║═£pąĪTn_nŻ¼ļŖ╠▌┐╔ęįåóäė▀\ąąĪŻ

KP_n, 2.5 Tn_n 60ms
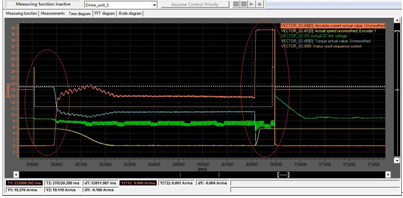
KP_n, 11.5 Tn_n 2.5ms
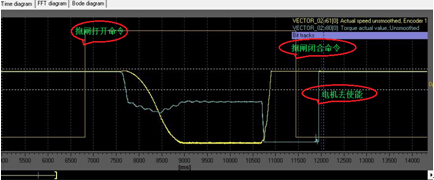
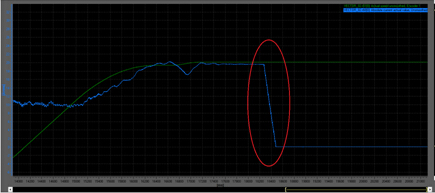
▀\ąą▀^│╠ųąŻ¼░l¼FļŖ╠▌▀\ąąį┌Özą▐─Ż╩ĮĢrŻ¼ļŖ╠▌├┐┤╬═Ż▄ćŻ¼Č╝Ģ■│÷¼FĘŪ│Ż┤¾Ą─Č┬▐DļŖ┴„Ż¼╗∙▒Š▀_ĄĮ┴╦ūāŅlŲ„Ą─ūŅ┤¾ļŖ┴„Ż¼īŹļHŪķørę▓╩ŪļŖ╠▌═Ż▄ćĢrČ╝Ģ■ėą║▄┤¾Ą─šäėŻ¼═©▀^ė^▓ņTracełDĄ─ļŖ┴„Ū·ŠĆ║═▒¦ķlķ]║Ž├³┴Ņ▌ö│÷Ż¼ūŅ┤¾ļŖ┴„│÷¼Fį┌▒¦ķlķ]║Ž├³┴Ņ▌ö│÷ų«Ū░Ż¼▒ŠśėÖCųąūāŅlŲ„Ą─▒¦ķl┐žųŲ├³┴Ņ╩ŪŽ╚▌ö│÷ĄĮļŖ╠▌┐žųŲų„░ÕŻ¼╚╗║¾ė╔ļŖ╠▌┐žųŲų„░Õ░l│÷▒¦ķl┤“ķ_║═ķ]║Ž├³┴ŅĪŻė╔TracełDĘų╬÷Ż¼┤╦Č┬▐DļŖ┴„│÷¼F╩Ūę“×ķļŖ─X┐žųŲų„░Õ░l│÷═Ż▄ć├³┴ŅŻ¼Č°║¾═©▀^Öz£yTTL▓ŅĘųą┼╠¢Ą├ĄĮļŖÖCĄ─īŹļH╦┘Č╚║¾┐žųŲ▒¦ķlŻ¼╩╣▒¦ķlķ]║Žäėū„Ž╚ė┌ūāŅlŲ„Ą─▒¦ķlĢrą“Ż¼ī¦ų┬ļŖÖCČ┬▐DĪŻ═©▀^░čūāŅlĄ─▒¦ķlĢrą“║═ļŖ╠▌┐žųŲų„░ÕĄ─▒¦ķlĢrą“▀MąąŲź┼õŻ¼Ž¹│²┴╦┤╦Č┬▐DļŖ┴„ĪŻ
ļŖ╠▌š²│Ż╣żū„ĢrŻ¼ļŖÖC╩ūŽ╚ĄĮ▀_ļŖ╠▌ūŅ┤¾╦┘Č╚Ż¼ļŖ╠▌┐žųŲų„░Õ═©▀^śŪīėŠÓļxėŗ╦Ń│÷Ą─╦┘Č╚░³ĮjŪ·ŠĆŻ¼«ö▐IĹ┐ņĄĮ▀_ųĖČ©śŪīėĢrŻ¼ŪąōQĄĮ┬²╦┘▀\ąą╩╣▐IĹĄū▓┐┼cśŪīėī”²RŻ¼═Ļ│╔ŲĮīėäėū„ĪŻ«ö╦┘Č╚┐žųŲŲ„Kp_n, 11.5Ż¼Tn_nŻ¼3msŻ¼ļŖÖC▀\ąą4.5rpmĢr│÷¼F┴╦╦┘Č╚š╩ÄĪŻ═©▀^TracełDĘų╬÷Ż¼ę“×ķį┌Ą═╦┘▀\ąąĢrKp_nŲ½┤¾Ż¼įņ│╔ļŖÖC▐D╦┘š╩ÄŻ¼ę“×ķļŖ╠▌åóäėĢrąĶę¬ļŖÖCŠ▀ėąĖ▀äėæBĒææ¬─▄┴”Ż¼╦∙ęį▓╗─▄┤¾Ę∙Č╚Ą─£pąĪKp_nŻ¼┐╔ęį═©▀^┬²┬²Ą─£pąĪKp_nŻ¼▒ŠśėÖCųą«öKp_n£pąĪĄĮ10.8ĢrŻ¼ļŖÖC╦┘Č╚į┌4.5rpm│÷¼FĄ─╦┘Č╚š╩ÄŽ¹╩¦Ż¼ļŖ╠▌į┌š¹éĆ▀\ąąų▄Ų┌ā╚Ż¼╦┘Č╚ŲĮĘĆĪŻ
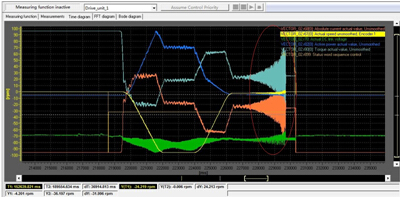
Kp_n, 11.5 Tn_n 2.5ms

Kp_n, 10.8 Tn_n 2.5msŻ¼ļŖ╠▌╔Žąą ļŖÖC░lļŖ▀\ąą
Kp_n, 10.8 Tn_n 2.5msŻ¼ļŖ╠▌Ž┬ąą ļŖÖCļŖäė▀\ąą
“×╩š£yįć╝░║¾Ų┌ā×
▒¦ķl┴”Öz£y╣”─▄:
×ķ┴╦▒ŻūCļŖ╠▌ęĘę²ÖC▒¦ķlŽĄĮyĄ─š²│Ż▀\ąąŻ¼į÷╝ė┴╦▒¦ķl┴”Öz£y╣”─▄ĪŻ
«öļŖ╠▌╠Äė┌┐šķe─Ż╩ĮĢrŻ¼ļŖ╠▌┐žųŲŲ„Ģ■▌ö│÷▒¦ķl┴”£yįćšłŪ¾Ż¼ė╔ūāŅlŲ„žōž¤ĮoļŖÖCę╗Č©Ą─Č┬▐D┴”ŠžŻ¼ė╔ļŖ╠▌┐žųŲ░ÕÖz£yęĘę²▌å╩Ūʱ│÷¼F┤“╗¼¼FŽ¾ĪŻ╚ń╣¹ėą┤“╗¼šJ×ķ▒¦ķl┴”▓╗ē“Ż¼ļŖ╠▌═Żė├Ż¼Ę±ätšJ×ķ£yįćš²│ŻĪŻ
Š▀¾wīŹ¼FĘĮĘ©×ķŻ║
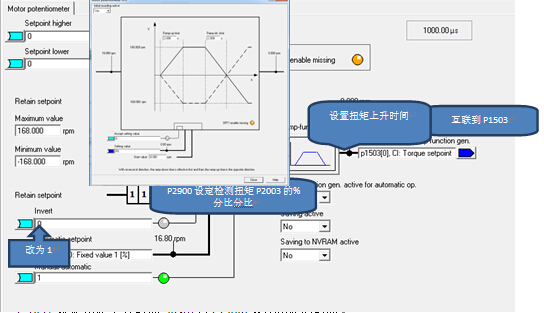
┴’▄ćā×╗»
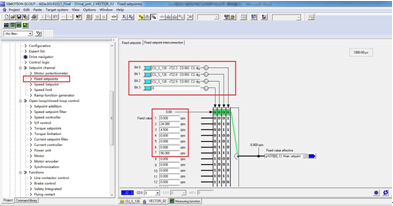
P2900 BICO ╗ź┬ōĄĮP1042Ż¼P2900 įOČ©┼żŠžĄ─░┘Ęų▒╚Ż¼╩ŪP2003Ą─░┘Ęų▒╚Ż¼
P1041 Ė─│╔1Ż¼ūįäėĮoČ©
r1050 BICO ╗ź┬ōĄĮP1503Ż¼£yįć┼żŠžĮoČ©
P1030 Ė─×ķ 2 HŻ¼╚ĪŽ¹╔Ž╔²ą▒Ų┬Ą─ŲĮ╗¼
P1047 įOČ©┼żŠž╔Ž╔²Ģrķg, 0NmĄĮP2003’@╩Š┼żŠžĄ─Ģrķg
P1501 BICO╗ź┬ōĄĮ ▒¦ķl£yįćČ╦ūė
═©▀^║åå╬Ą─ģóöĄįOų├Ż¼└¹ė├MOPĄ─ą▒Ų┬░l╔·Ų„Ż¼īŹ¼F┴╦▒¦ķl┴”£yįćĄ─ę¬Ū¾ĪŻ
ļ[▓ž╩ĮļŖÖC═ŻÖC╚źļŖ┴„Ż║
ė└┤┼═¼▓ĮļŖÖCĖ∙ō■▐DūėĮYśŗę╗░Ń┐╔Ęų×ķ═╣śO╩ĮŻ©IPMSMŻ®║═ļ[╝ē╩Į(SPMSM)ĪŻ
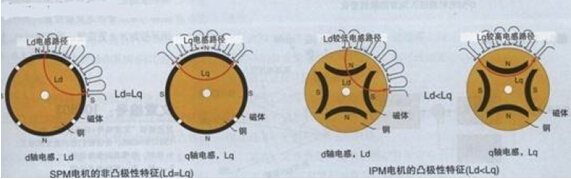
ī”ė┌IPMSMŠ▀ėą├„’@Ą─═╣śOą¦æ¬Ż¼╝┤ų▒▌SļŖĖą┼cĮ╗▌SļŖĖą▓╗ŽÓĄ╚Ż©ę╗░ŃŻ®Ld < Lq
ī”ė┌SPMSMø]ėą═╣śOą¦æ¬Ż¼╝┤Ld = Lq
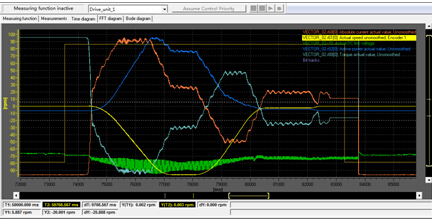
į┌ė└┤┼═¼▓ĮęĘę²ÖCį┌ļŖ╠▌ų„╠ß╔²Ą─æ¬ė├▀^│╠ųąŻ¼░l¼Fļ[╝ē╩Į═¼▓ĮļŖÖCį┌═Ż▄ćĢrĢ■░l│÷ėąäeė┌▒¦ķlķ]║ŽĄ─Ēæ┬ĢŻ¼ė░Ēæ┴╦ļŖ╠▌│╦ū°Ą─╩µ▀mĖąĪŻ
ė╔Ž┬łD░l¼F¼Fł÷▒O┐žļŖļŖÖC═Ż▄ćS120╚ź╩╣─▄╦▓Ż¼ė╔į┌ļŖÖC┴Ń╦┘═Ż▄ćĢrŻ¼░l¼Fėą3rpmĄ─╦┘Č╚š╩ÄŻ¼▀@éĆ╦┘Č╚š╩Äī¦ų┬┴╦═Ż▄ćįļ궥─│÷¼FĪŻ
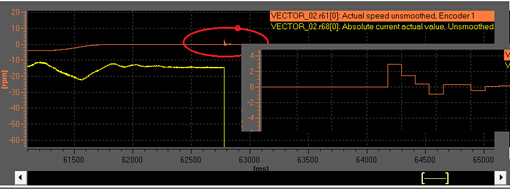
ļŖÖC┴Ń╦┘═Ż▄ć╦┘Č╚Ū·ŠĆ
Ė∙ō■ė└┤┼═¼▓ĮļŖÖCĖ∙ō■▐DūėĮYśŗę╗░Ń┐╔Ęų×ķ═╣śO╩ĮŻ©IPMSMŻ®║═ļ[╝ē╩Į(SPMSM)Ą─ų„ę¬▓╗═¼³c╩ŪLd ║═ Lq▓╗ŽÓĄ╚Ż¼æčę╔╩Ūʱę“×ķ╚ź╩╣─▄ĢrļŖ┴„═╗╚╗ūā×ķ┴ŃŻ¼ī¦ų┬┴╦ļŖÖCĄ─šäėĪŻ
╦∙ęį×ķ┴╦“×ūCļŖ┴„═╗ūā╩Ūʱš╩ÄĄ─ų▒ĮėįŁę“Ż¼╦∙ęį┴╦═©▀^DCCŠÄ│╠£pŠÅ┴╦ļŖÖC╚ź╩╣─▄ĢrĄ─ļŖ┴„═╗ūāĪŻ
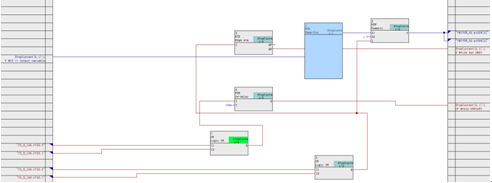
DCC╣”─▄łD
īŹ¼FĄ─ų„ę¬įŁ└Ē╩Ūį┌ļŖ╠▌┐žųŲų„░Õ▓╗░låóäė├³┴ŅĮoūāŅlŲ„ĢrŻ¼╝ż╗ŅDCCą▒Ų┬║»öĄĪŻ═©▀^┼żŠžŽ▐Ę∙Ą─ĘĮ╩ĮīŹ¼FļŖÖCļŖ┴„░┤ššą▒Ų┬ŠÅ┬²Ž┬ĮĄŻ¼▀_ĄĮŽ¹│²ļŖÖC═Ż▄ćšäėĄ─å¢Ņ}ĪŻė╔Ž┬łD┐╔ęį┐┤ĄĮŻ¼«öļŖ┴„░┤ššą▒Ų┬Ž┬ĮĄĢrŻ¼ļŖÖC╦┘Č╚ø]ėą│÷¼FČČäėĪŻ
Ħ╚źļŖ┴„╣”─▄Ą─┴Ń╦┘═Ż▄ćŪ·ŠĆ
╬ÕĪóśėÖCķ_░lĮY╣¹
┤╦ļŖ╠▌ļŖ┴”═ŽäėŽĄĮyŻ¼Å─š{įćĮY╩°ų┴Į±ęčĮøĘĆČ©▀\ąą┴╦ę╗─ĻČÓŻ¼«aŲĘąį─▄║═ļŖ╠▌│╦ū°╩µ▀mČ╚Č╝Ą├ĄĮ┴╦┐═æ¶Ą─šJ┐╔ĪŻ¼Fł÷īŹļHš{įć┴╦ā╔┼_ļŖ╠▌ė└┤┼═¼▓Į¤o²XęĘę²ÖCŻ¼═©▀^║åå╬Ą─ģóöĄįOų├Ż¼ęį╝░ā×╗»╦┘Č╚Łh▒╚┴ąKp_n║═ĘeĘųTn_nŻ¼╚▌ęūīŹ¼F┐═æ¶ę¬Ū¾Ą─ąį─▄,DCC║═BICO╣”─▄Ż¼┤¾┤¾╠ßĖ▀┴╦ŽĄĮy╣”─▄Ą─┐╔öUš╣ąįĪŻ
┴∙Īóæ¬ė├¾wĢ■
į┌śėÖCķ_░lŪ░Ų┌Ż¼ČÓĘN┐žųŲĘĮ░ĖĄ─ī”▒╚╩ŪĘŪ│Żųžę¬Ą─Ż¼į┌ØMūŃ┐žųŲąį─▄ę¬Ū¾Ą─Ū░╠ߎ┬Ż¼▀xō±ąįār▒╚ūŅĖ▀Ą─┐žųŲĘĮ░ĖŻ¼╠ßĖ▀╬ęéā«aŲĘĄ─ĖéĀÄ┴”ĪŻ
Ų▀Īóģó┐╝╬─½I
(1) SIEMENS SINAMICS S120 ģóöĄ╩ųāį 01/2013
(2) SINAMICS S120 Function Manual Drive Functions 04/2014
(3) ė└┤┼═¼▓Į¤o²X▌åęĘę²ÖC─┐Ū░ĀŅæB╝░░lš╣┌ģä▌ ū„š▀Ż║äó╬─│¼ ±Ń╬─├„

