|
�܊
�P�I�~��PID���ƣ�LabVIEW��NI DAQ�O��
�������Ԅӿ����У�һ��ϵ�y���\��Ҫ���܉�M��o��������ָ�ˣ����п��ɔ_�����ͷ����ԡ����ڱ����ƵČ����䱾���������Y�������^����һ���ģ��ڽo����̖���Õr�������ݔ������һ���ܝM��ϵ�y������Ҫ��������Ҫ����һ�����������������c���،������]�h����ʽ����ϵ�y���Ԏ�������ϵ�y��ݔ���M��o��������ָ�ˣ����������\�õĿ���Ҏ�ɶ�N���ӡ�
����PID(Proportional Integral Derivative�����ַe��)�����ǿ��ƹ����м��g���죬���ÏV����һ�N���Ʋ��ԣ������^�L�ڹ��̌��`�����γ���һ�������Ŀ��Ʒ����͵��͵ĽY����
PID����
����PID�������Y�����Ρ������Ժá������ɿ����{�����㡣�����،���ĽY���ͅ���������ȫ�����գ���ò������_�Ĕ��Wģ�͕r��������Փ���������g�y�Բ��ã�ϵ�y�������ĽY���ͅ�������������ͬF���{ԇ���_�����@�r����PID���Ƽ��g��鷽�㡣��ˮ��҂�������ȫ�˽�һ��ϵ�y�ͱ��،�����ͨ�^��Ч�Ĝy���ֶ��@��ϵ�y�����r������PID������֮�أ��D1����
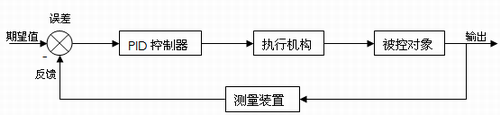
�D1 PID����ϵ�y
����PID���˼�x�����Ǹ���ϵ�y�`�����ñ������֣��e��Ӌ����������M�п��ơ��������e�֣����@�����h������������и��Բ�ͬ�����ã��ڬF��Ҳ���Ը������H��r���x��ʹ�á�
P���ƣ��������ƣ�
���������������ݔ���H�H�c�`��������Pϵ����u(t)=Kp��(t)���㘋����һ����������������Ҋ�������������H����һ��������{�ķŴ������D2��������������ͨ�^��׃�����Ŵ�ϵ��Kp�{��ݔ�������`��ķ����ܿ죬������ݔ���c����ֵ֮�g���Ǵ���һ�����B�`����ʹ���քӏ�λ���������ڌ��H�\���кܲ����㡣���Kpֵ��������ϵ�y���_�h���棬ʹ���B�`��pС��߀�܉�����ϵ�y�Ŀ����ԣ�������ʹϵ�y�ķ����̶�׃���ʎ׃�ࡣ����KpֵС�r���֕�ʹϵ�y����׃�þ���������У��ϵ�y���نΪ�ʹ��P���ơ�
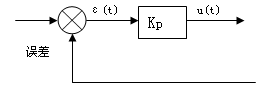
���������� �D2 ��������
I���ƣ��e�ֿ��ƣ�
��������P���ƴ��ڷ��B�`����Ҫ�քӏ�λ���˂��l�F����ͨ�^����һ���e��헁��������B�`��e�ֿ�������ݔ���c�`����̖�ķe�ֳ����ȣ���  ������PI��������ݔ���У� 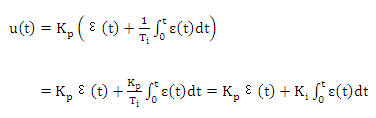
��������������������������������ʽ1��
�����e��헌��`���M�зe�֣��S���r�g�����ӷe�������ֻҪ�`��߀���ڣ��͕�����ݔ�����@�ӣ������`���С���e���Ҳ���S���r�g�����Ӷ��Ӵ��Ƅӿ�������ݔ������ʹ���B�`���Mһ���pС��ֱ�������㣬���_���������B�`���Ŀ�ġ���ˣ�PI������������ʹϵ�y���M�뷀�B��o���B�`����nj��r�g�ķe�ֱ،�Ӱ�ϵ�y�Ŀ��لӑB���ܣ�����һЩϵ�y�����F���{�^��ĬF���ص���������ϵ�y������
D���ƣ��ֿ��ƣ�
�����e�ֿ��ƵĄӑB���ܲ��ã������ǡ�ÿ��ԏ��a�@�c���ֿ�������ݔ�����`����̖���ֳ����ȣ���  ������PD��������ݔ���У� 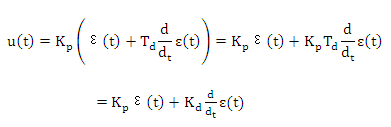
�������������� ��ʽ2��
���������÷�ӳ�����`����̖��׃���ʣ����Ԍ�ϵ�y���ƾ����AҊ�ԣ����AҊ�`���׃��څ�ݣ�����ܮa����ǰ�Ŀ������á��������`���γ�֮ǰ�������ѱ����{��������������������֕r�g�x����m�����Ԝp�ٳ��{��ϵ�y�{���r�g��ʹϵ�y�ĄӑB���ܴ����ߡ��ֿ����ڌ��H�\���н����Á������e�ֿ��Ʈa���IJ�����څ�ݣ������䷴�������`���׃���ʣ����ԃH���ӑB�^�����ã�ͨ�����Ϊ�ʹ�á������ֿ��ƌ����ɔ_�зŴ����ã��^�����{����헌�ϵ�y���ɔ_����������
PID����
����PID���Ƽ��������ơ��e�ֿ��ơ��ֿ��ƵĽM�ϣ��C����3�N�������ă��c���ڌ��H�\���У��ЕrҲ����Ҫ�õ�ȫ����3�����֣�ֻ�б������Ɔ�Ԫ�DZز����ٵġ�����PID��������ݔ���飺
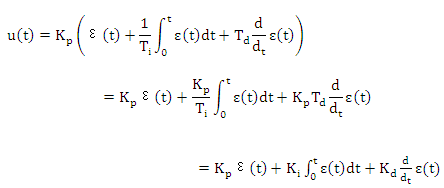
����������������������������������������ʽ3��
����PID���ƌ��H���Ǹ�������Ki��Kd�@3�������M���������Եõ����m��ݔ��ֵ��ϵ�y�M�п��ơ����w���������������ͬ�ĬF��������ͬ��ĿǰPID���H���ÏV�����lչҲ�ܿ죬���о����ܶ����@3�������M�������������ܿ��������ں�Ӌ��C�@�ӵĔ��ֿ������Y�Ϻ�߀���F�˔���PID���OӋ���������^���wԭ��߀����ѭ�ڂ��y��
|

