|
1 ����
늄�(d��ng)�����D(zhu��n)��ϵ�y(t��ng)EPS( Electric Power Steering)�������D(zhu��n)���ָкã���(ji��)ʡȼ�͡��h(hu��n)�����b���`��ȃ�(y��u)��(sh��)����������fʽ�ęC(j��)е�D(zhu��n)��Һ�������D(zhu��n)��ϵ�y(t��ng)��
������܇����Ҫ�İ�ȫ����֮һ��EPS�����a(ch��n)�����M(j��n)�Ї�(y��n)������ܜy(c��)ԇ�c�;�ԇ�(y��n)���(y��n)�C��ɿ��Բ��@����ѹ�����B(t��i)��(sh��)��(j��)�����ڌ�(sh��)܇ԇ�(y��n)���HΣ�U(xi��n)�Ը����M(f��i)�ð��F�����a(ch��n)�̸��A���ڴԇ�(y��n)�_(t��i)��(l��i)ģ�M��ͬ���r�µČ�(sh��)܇ԇ�(y��n)���@�N��ʽ���H��ȫ�����㡢�ɱ��^�ͣ������܉��_(d��)�����^����Ч����
2 ϵ�y(t��ng)�O(sh��)Ӌ(j��)
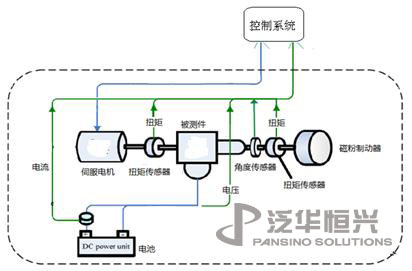
ԇ�(y��n)�_(t��i)��Ҫ�əC(j��)е�_(t��i)�ܡ�����ϵ�y(t��ng)�Ș�(g��u)��,��D2.1��ʾ�������ŷ�늙C(j��)�����{�T��(du��)����P(p��n)�IJ������ŷ��Ƅ�(d��ng)���M(j��n)�з��治ͬ·�r�µ��D(zhu��n)������, EPS���鱻�y(c��)���ṩ�D(zhu��n)�����������У�����ϵ�y(t��ng)����λ�C(j��)���y(c��)ԇ�_(t��i)�������M�ɣ������ܿɷ֞��(q��)��(d��ng)ϵ�y(t��ng)�����dϵ�y(t��ng)���Ӽ���늺�ͨ��ϵ�y(t��ng)�����@�Ă�(g��)����ϵ�y(t��ng)������ 4��(g��)�ɷքe��(d��)���\(y��n)�еĆ�Ԫ����ͬ�r(sh��)�y(c��)ԇ 4 ֻEPS �Ӽ���

�Dʾ EPS�;���ԇ�(y��n)�_(t��i)
2.1 ����ԭ��
ϵ�y(t��ng)��ֿ��]ģ�K���O(sh��)Ӌ(j��)������ԭ���O(sh��)Ӌ(j��)��D2.2��ʾ�������(q��)��(d��ng)ϵ�y(t��ng)ʹ���ŷ�늙C(j��)���������(q��)��(d��ng)늙C(j��)�D(zhu��n)��(d��ng)����(du��)ݔ��˵��D(zhu��n)�ǡ�Ť�صȔ�(sh��)��(j��)�M(j��n)�Мy(c��)������������(sh��)�F(xi��n)�(q��)��(d��ng)������(sh��)���]�h(hu��n)�{(di��o)����
�ŷ��Ƅ�(d��ng)��������dϵ�y(t��ng)����ؓ(f��)�d��ʽͨ�^(gu��)PXIϵ�y(t��ng)���̿��ƣ��@��ؓ(f��)�d�˵�Ť�غ��D(zhu��n)�ǔ�(sh��)��(j��)����ͨ�^(gu��)������������(sh��)�F(xi��n)Ť�ص��]�h(hu��n)���ơ�
���ϵ�y(t��ng)ʹ������Դ��늳ز�(li��n)��ʽ��(du��)ϵ�y(t��ng)���g�늣����Cϵ�y(t��ng)���L(zh��ng)�ڷ�(w��n)����������ϵ�y(t��ng)�������g����(du��)ÿ��(g��)�Ӽ��ĺ���M(j��n)�бO(ji��n)�y(c��)���xȡÿ��(g��)�Ӽ���늉������ֵ��ͬ�r(sh��)�Ɍ�(du��)��·�Դ�S�r(sh��)���c��ͨ��
�D2.2 ԭ��D
2.2 늚��O(sh��)Ӌ(j��)
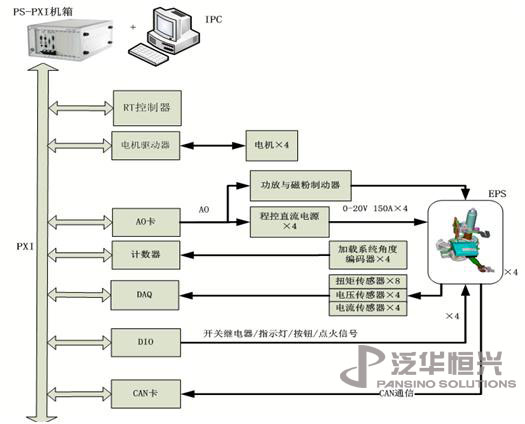
�D2.3 늚��O(sh��)Ӌ(j��)
ϵ�y(t��ng)�ڳ��ģ�M4��(g��)EPS����������B(t��i)�Ļ��A(ch��)�ϣ�ʹ��PXI��(du��)ϵ�y(t��ng)����(g��)ģ�K�M(j��n)�п��ƣ���(sh��)��(j��)�ɼ���������̎�����ɹ���Դ��PXI���������\(y��n)��(d��ng)���ƿ���AOģ�Mݔ������Ӌ(j��)��(sh��)��������(sh��)��(j��)�ɼ����͔�(sh��)��IO����(g��u)�ɡ��\(y��n)��(d��ng)���ƿ������(q��)��(d��ng)ϵ�y(t��ng)���Ă�(g��)늙C(j��)���D(zhu��n)��(d��ng)���C(j��)��������\(y��n)��RT����ϵ�y(t��ng)�����Cϵ�y(t��ng)��(w��n)���ɿ��\(y��n)�С�DAQ�忨ģ�Mݔ�����ڲɼ�Ť��������Ϣ��EPS��늵�늉��������Ϣ��Ӌ(j��)��(sh��)���������xȡ�(q��)��(d��ng)ϵ�y(t��ng)�ͼ��dϵ�y(t��ng)�ľ��a����Ϣ�����ڜy(c��)ԇ�Ƕȡ�AOģ�Mݔ������ݔ�����ƹ���Դ늉���ͬ�r(sh��)���ɼ����ýǶ���̖(h��o)�D(zhu��n)�Q��ģ�M��ݔ������(sh��)��IO �忨���ڿ����c(di��n)����̖(h��o)�����Դ�_(k��i)�P(gu��n)����·EPS����_(k��i)�P(gu��n)���c(di��n)����̖(h��o)�_(k��i)�P(gu��n)��ָʾ���ȡ�
2.2 �Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
ϵ�y(t��ng)�C(j��)е�Y(ji��)��(g��u)��D2.2��ʾ�����(q��)��(d��ng)ϵ�y(t��ng)��EPS�����dϵ�y(t��ng)�M�ɡ������r(sh��)���(q��)��(d��ng)ϵ�y(t��ng)����(d��ng)EPS�D(zhu��n)��(d��ng)�����dϵ�y(t��ng)��(du��)EPS���\(y��n)��(d��ng)���������á�
���˺͌�(sh��)܇��r����һ�£�EPS �;��Ԝy(c��)ԇϵ�y(t��ng)���ø߿ɿ����S�к͌�(d��o)܉�����C���(q��)��(d��ng)ϵ�y(t��ng)���S��λ�á��Ƕȣ����d�˵ĽǶ��܉��`���{(di��o)��(ji��)��ͬ�r(sh��)���d��X��Y��Z���x���������{(di��o)�����`����{(di��o)��(ji��)�C(j��)��(g��u)ʹ��ϵ�y(t��ng)�����m��(y��ng)��N��ͬ��̖(h��o)��EPS�y(c��)ԇ��
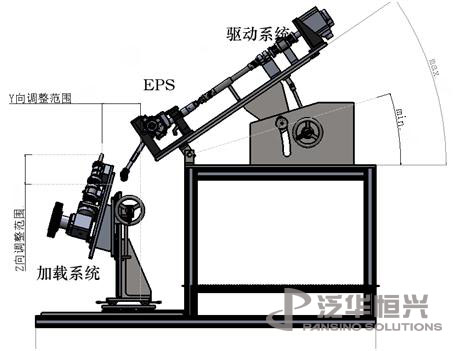
�D2.4�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
2.3 ܛ���O(sh��)Ӌ(j��)
ϵ�y(t��ng)����LabVIEWܛ���M(j��n)���_(k��i)�l(f��)�����ϵ�y(t��ng)�Č�(sh��)�r(sh��)���Ɯy(c��)�����ڱ��C�y(c��)ԇ���ȣ��ٶȵȻ��A(ch��)��ϵ�y(t��ng)��(w��n)���ɿ��\(y��n)�С��y(c��)ԇ�������^�����R���Ԅ�(d��ng)ӛ䛜y(c��)ԇ��(sh��)��(j��)���y(c��)ԇϵ�y(t��ng)�߂��e(cu��)�`�c����̎��������
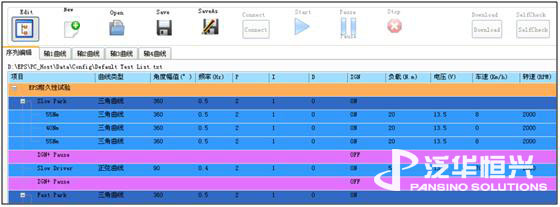
�D2.5 �������
ϵ�y(t��ng)���O(sh��)Ӌ(j��)�Ĝy(c��)ԇ�����`��ɾ����ɸ���(j��)��ͬ��·�r����ͬ�Ĝy(c��)ԇ���У���D2.5��ʾ���Ñ����Զ��x�(q��)��(d��ng)�˵��D(zhu��n)�����������d�˵�ؓ(f��)�dŤ�������������ǘ�(bi��o)��(zh��n)�����Ҳ������Dz���������Ҳ�������Զ��x�������������Y(ji��)���Զ��x�����Ͳ�ͬ��܇�٣��l(f��)��(d��ng)�C(j��)�D(zhu��n)���Ñ������O(sh��)Ӌ(j��)����ͬ�IJ�����ģ�͡�·�rģ�ͣ����к�(qi��ng)���m��(y��ng)�ԡ�
�D2.6 �y(c��)ԇ����
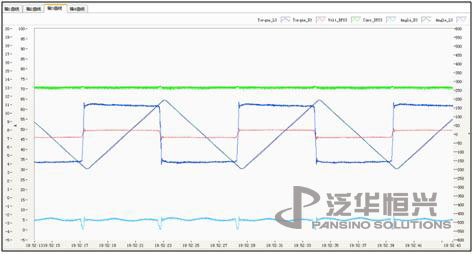
�y(c��)ԇ�Y(ji��)��������(sh��)�r(sh��)�@ʾ����D2.6��ʾ��ϵ�y(t��ng)��(sh��)��(j��)���ö��r(sh��)���棬��ÿ�\(y��n)��һ�Εr(sh��)�g��һ�Δ�(sh��)��(j��)��һ���l(f��)���e(cu��)�`ϵ�y(t��ng)�Ԅ�(d��ng)�����e(cu��)�`�l(f��)��ǰ��һ�Εr(sh��)�g�Ĕ�(sh��)��(j��)������(l��i)�������Ñ��M(j��n)�Д�(sh��)��(j��)�������l(f��)�F(xi��n)�a(ch��n)Ʒ�еIJ����cȱ�ݡ�
3 ϵ�y(t��ng)���ܼ�ָ��(bi��o)
3.1 ϵ�y(t��ng)����
ϵ�y(t��ng)���Ԍ�(sh��)�F(xi��n)�Ĺ����У��Զ��x�D(zhu��n)�����������d�������Զ��x�y(c��)ԇ���У��O(ji��n)�y(c��)���Ј�(zh��)�Р�B(t��i)���O(ji��n)�y(c��)EPS��ݔ��ݔ���Ƕȡ�Ť�غͱ��y(c��)���Ĺ���늉���������Լ����N��(sh��)��(j��)ӛ䛷�ʽ�ȡ�ϵ�y(t��ng)��Ҫ�����(xi��ng)ĿҊ(ji��n)��3.1��ʾ��
��3.1 ϵ�y(t��ng)����
| e |
�(xi��ng)Ŀ |
���� |
| �����(xi��ng)Ŀ |
�_(t��i)�ܿ������(q��)��(d��ng)ϵ�y(t��ng) |
�(q��)��(d��ng)ϵ�y(t��ng)���� |
늙C(j��)�ٶȡ�λ�ÿ��� |
| �(q��)��(d��ng)ϵ�y(t��ng)�y(c��)ԇ |
�y(c��)ԇ�(q��)��(d��ng)ϵ�y(t��ng)��Ť�ؼ��Ƕȣ� |
| �_(t��i)�ܿ��������dϵ�y(t��ng) |
���dϵ�y(t��ng)���� |
���ƴŷ��Ƅ�(d��ng)�����d��(sh��)�F(xi��n)Ť�ص��]�h(hu��n)���� |
| ���dϵ�y(t��ng)�y(c��)ԇ |
�y(c��)ԇ��·���dϵ�y(t��ng)��Ť�ؼ��Ƕ� |
| ��(sh��)����̖(h��o)�O(ji��n)�y(c��) |
�O(ji��n)�y(c��)�_(t��i)�ܿ������l(f��)����ݔ��ݔ���Ƕ���̖(h��o) |
| ���ϵ�y(t��ng) |
���ϵ�y(t��ng)���� |
�ɾ����Դ����늳ر��Cϵ�y(t��ng)���g���\(y��n)�� |
| ���ϵ�y(t��ng)�y(c��)ԇ |
�y(c��)��늆�Ԫ��늉��c����� |
3.1 ϵ�y(t��ng)ָ��(bi��o)
��3.2 ϵ�y(t��ng)ָ��(bi��o)
| �y(c��)ԇ�����(xi��ng) |
���� |
���� |
| �D(zhu��n)�� |
≥±550° |
8192�� |
| ؓ(f��)�dŤ�� |
0~175Nm |
—— |
| ���ٶ� |
0~400°/s |
—— |
| ��� |
0-20V |
0.1V |
| ��� |
0-100A |
0.1A |
4 ���Y(ji��)
늄�(d��ng)�����D(zhu��n)��ϵ�y(t��ng)�;���ԇ�(y��n)�_(t��i)����EPS�;��Ԝy(c��)ԇƽ�_(t��i)�����`����{(di��o)��(ji��)�C(j��)��(g��u)�����Զ��x��·�r��Ϣ���ɾ��Ĝy(c��)ԇ���У���(ji��n)�̿ɿ����O(sh��)��Y(ji��)��(g��u)ʹ��ԓϵ�y(t��ng)�m��(y��ng)�Էdz���(qi��ng)����������܇�ϴ�늄�(d��ng)����ʽ�D(zhu��n)��ϵ�y(c��)ԇ�ͷ����õ��O(sh��)�䡣
�����īI(xi��n)
[1] ���ۼt�����\(y��n)��(l��i). ��܇EPS���ܙz�y(c��)�c�u(p��ng)������. 1003-8639��2011(4)��52-56.
[2] ����ϼ.��܇EPS늙C(j��)Ť�y(c��)ԇ�_(t��i)���O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n). 1673-1131, 2013(2)��54-55.
[3] �A܊. EPSϵ�y(t��ng)�C�����܌�(sh��)�(y��n)�о�. ���Kʡ��܇���̌W(xu��)��(hu��)�ھŌÌW(xu��)�g(sh��)���(hu��)��2010�����K.
|

