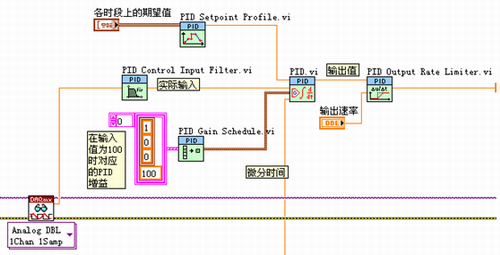
����PID Lead/Lag.vi���Ԍ�PID������ǰ����ϵ�y(t��ng)��������ݔ����̖���ӑB(t��i)�a����PID Setpoint Profile.vi����������ֵ�g����׃���rʹ��׃��ƽ����PID Control Input Filter.vi��һ�����A�ĵ�ͨ�V����������PID��������process variableǰ�ˣ����ԞVȥС�ڲɘ���ʮ��֮һ��ݔ��ֵ����������������������PID Gain Schedule.vi���Ԍ���M���慢��(sh��)�����o���l������(zh��)�Еr��ݔ����̖�_���l������ʹ�Ì�����һ�M����(sh��)�o�뵽PID��������PID Gains�ϡ�PID Output Limiter.vi��PID������ݔ����̖��׃�������M�п��ƣ��Ա��C�ⲿ���ܿ�����̖�����İ�ȫ��PID EGU to %.vi��PID % to EGU.viؓ؟�����H��(sh��)ֵ�������O�����̆�Ԫ������ռ�İٷֱ��M���D�Q��