|
܉������܉��Ѳ�z�C������������е��\�ó�̽
1 ����ҬF��
Ŀǰ����ҵ��\�й�����ʽ����y��վ��Ѳ�z���ֹ����|����������Ă��y�ַ�ʽ�������ڂ��yģʽ�£��o����Ч�@ȡ׃�վ�\�е�ȫ����Ϣ��������ɹ����ϵ�ä�^��վ����Ϣ���̶����������Ч�ʵ��¡�
���Ԛw�{���Y�������c��
1.1��վ�\�еİ�ȫ�ɿ��Ա��ϴ����[��
����7X24С�r���g���\�еķ��]����ҭh�����f�����������o��ͬ�r�O�ض��_����·�Ĕ������˞齛�ʽ�A��Ҳ�y�ԝM��ȫ�桢���ʡ����r��Ҫ���Â��y����������Ѳ�z�ķ�ʽȥ���팍�r�\�е��������ϵ�y���ض����������Թ���ä�^���M���[���T�లȫ�[�����ڔ�����Ϣ�������ėl���£������ڹ��ϵļ��r�A�����������Дࡣ
1.2ֵ���ˆT����Ч���^�����
�����������w�ڿ������]�Ҵ���һ��������늴�ݗ����Ⱦ�Ĺuʽ׃�վ�h�������䵽����r��������B��������Ч�ȟo���������r��Ч�����ա����⣬�����R�ˆT����r��Ŀǰ�ļ��|�Y��ӛ䛺��˞齛�ʽ����ģʽ���o��ʹ��վ���ԡ�֪�R�ͽ���γ���Ч���B�m���f��ͬ�r���M�ˆTҲ�y�� �ڶ��ڃ�ȫ�����������չ������r��
1.3�\�еĽ����Բ���
ȱ�������ȫ����Ϣ�ɼ��ֶΣ������Ѓrֵ�Ĕ������cʽ�������ڼ��|�Y���У��o���γ�ֱ�^���B�m��Ч����S�ȡ��ɷ������wϵ�Ԕ������o���������������������ܞ���탞�������ܽ��ġ���ԇ�����������ṩ������֧�Ρ�
1.4����ИI늹������YԴ���㡢�ĘI�ˆTˮƽ����R
������\�I�ɱ��{�������y�ȴ�ֱ��Ӱ푵���늰�ȫ�C�����ϸ��N���أ����y����ҵ��\��ģʽ�ڌ��H�\�I�^���б�Խ��Խ���@���ڻ��W+���˹����ܡ����W���ٰlչ�Ľ��죬��θ�׃�@һ�F���������ҵ��\�а�ȫ�ͽ����\�I�ɱ�Ҳ����u�������I�������ճ̡�
��ˣ������ֵ���C�����@һ�µ��\�S�O��Ҳ�͑��\������������û��W��Ϣ���g������I��ֵ��늹�����Ҫ�c���W˼�S�Y����һ�𣬝M���Ј����Ñ���������\�S�����Ќ�늹�������ȫ�Լ����ͳɱ����ܜp�ŵ�����
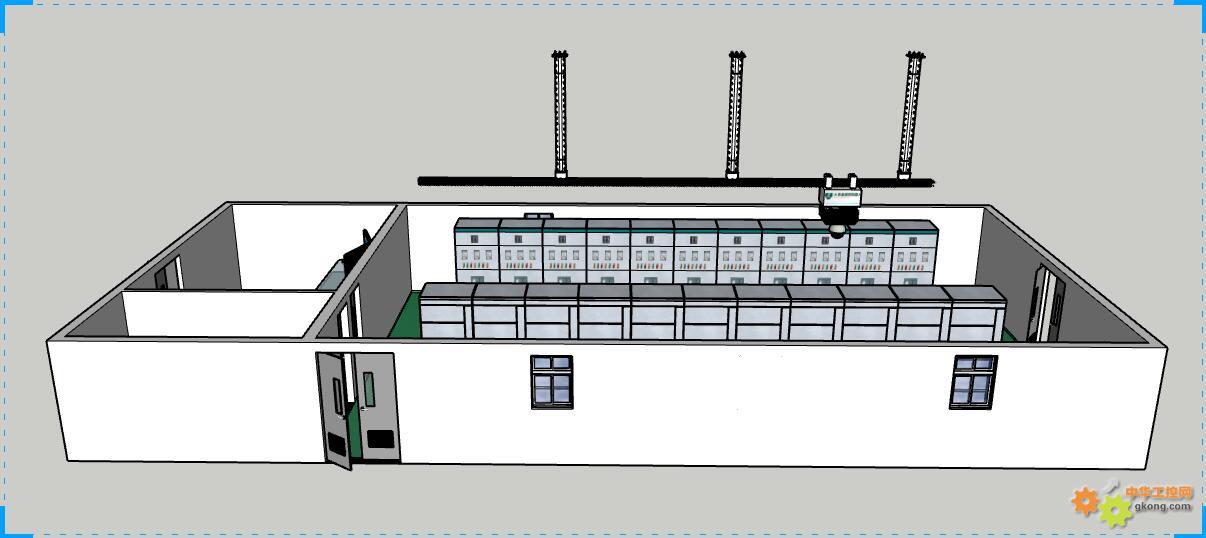
2����܉��Ѳ�z�C���˵ĸ���
����܉��Ѳ�z�C�������������Z���R�e���ƄӽK�˺��пض˿���Ѳ�z�C�������ߵ�ָ��λ�D��ͨ�^�P�I���g�ʴ_�@ȡ���h����Ϣ���z�y��������ָ�˔������������P�����ɼ��ռ���ݔ���͑��ˣ���һ�N�m���ڶ�N�h���¾߂��N���ܵ��Ƅ��O�䡣
3����܉��Ѳ�z�C����������ҵđ���̽ӑ
����܉��Ѳ�z�C�����܉�������Ҍ��F���a�\�бO�ء������xȡ����ȫ���o���ܣ���ͨ�^�ƈD��λ�������ͱ��Ϲ���������aֵ�ء�Ѳ�z�ȹ�������������ҟo��ֵ��ģʽ�đ���
��Ҫ������
3.1���a�������ֻ�
����܉��Ѳ�z�C����ʹ�ÈD���R�e���g�����F���a������ָ�ʽ�x��������ʽ�x�픵ֵ�������xȡ����ɔ����ķ��ӛ䛡��惦��ͨ�^վ�ȾW�j�cվ��ϵ�y�������ϣ��a��ϵ�y�����IJ��㣬�γ�������는��ָ�ʽ��������������܉��Ѳ�z�C���˿�����Ч���a���a�����z�y�IJ��㣬��Q��F�����H�l�����Ƃ������o�����b���������a�\�бO�ز���Ć��}���p���˸��쌦���a��Ӱ푣����������a�\���L�U����ʩ�o��ֵ�ص��y�ȡ�
3.2��������
����܉��Ѳ�z�C����ʹ�ÈD���R�e����Ę�R�e���g�����F����ҹ����ˆT������ˆT���������w�������R�e�������ς�����ϵ�y��������ˆT�ij�����r�γ�������־�͈D�����Ϣ�Ă�ݣ��������J����r�M�Ј����{����Ұ������������������a�����L�U����ʩ�o��ֵ�ص��y�ȡ�
3.3�����h���O�y
����܉��Ѳ�z�C����ʹ�à�B�z�y���g���Ɍ�����҃ȸ��N���|�M�бO�y��ͨ�^ϵ�y�γ����a�O�y��־���A���L�U�ȼ����M�м��r���h�̈�������Ч���a����Ҕ��ֻ������й��r�z�y�IJ��㣬���������a�\�а�ȫ�L�U����ʩ�o��ֵ�ص� �y�ȡ�
3. 4�O��O�o
����܉��Ѳ�z�C����ʹ�üt���������R�e�ȼ��g����������O����\�Мضȡ�������r�M�бO�y������O���\�Д����ķ��ӛ䛡��惦�����γ����a�z�y��־�����F�ˌ�������O���\����Ч�O�y���Mһ�����F���ϵ��A�У����r�l���A������Ч�����O��p�ļ����a�¹ʡ�
���⣬����܉��Ѳ�z�C����ʹ�ÿ�ҕ���ض��R�e���g�����F׃�����Ҫ�O���\�Ѕ����ıO�y������O���\�Д����ķ��ӛ䛡��惦�����γ����a�z�y��־�����O�䮐���\�Еr���r��������O������Ų顢�S�oЧ�ʣ�����Ч����늚��O��p�ļ�����¹ʡ�
3.5�ճ�Ѳ�z�����aֵ��
����܉��Ѳ�z�C����ʹ���ƈD��λ���������ܱ��ϼ��g��������r�°����A��������������M������Ѳ�z��Ѳ�z��ص�ֵ����ֵ�࣬�O�������ϵ�y�\�У���ϵ�y�����r���r������ˆT����Ѳ�zֵ�����
4������
4.1�����Ѳ�z�C���˵ĽY��
���ƄәC���ϣ����b�˟o߅���PTZ�z��C�Ϳ���ϵ�y��
�@��z��C����С�͉��T�X���b�ļt��D������������m���ڐ��ӭh�����z��C��ƽ�ƺ̓Aб�Ƕȷքe��360°��105°�� ��ˣ���������У��z��C�ȶ����̶��z��C���ṩ����IJɼ��D�����ڃAб�S���b��С�ͼt��ضȂ������ͼ�������������z��Cƽ�ƻ�Aб�r���ضȂ��������ԙz�y�z��C�Ĕz�D���м������������w�Ĝضȡ�
�C���˿���ϵ�y�����D�����C�����ϵ�늚����ϵ�y���h�̲����ͱOҕ����늚����ϵ�yؓ؟�C���˵��ƄӺ���̖̎�����������������w��������C0��CH4��C02��02)���ضȂ��������t����x�������ͳ�����������
4.2�C���˵IJ�������
Ѳ�z�C���������R�ď��s�΄Օ�������ҭh���IJ��������ͬ�����ǣ������ڃɂ����������Ƶģ���1)��Ҫ���]�Ż���ij���2)�����]Ѳ�z����
����һ��700mmX700nun��Ѳ�zͨ�������ڙC���˵ęz�y�����������ɼ��^�����£����ȣ��z��C���@һ���D��Ȼ��ͨ�^�D��̎���㷨�R�e��ͨ����·�������ͨ������ �����C���ˌ�ֹͣ����ͨ�J��B�����o�Oҕ������t���C���ˌ������D��̎���Y��Ҏ�����Ƅ�·����ͬ�r�����r�ռ�C0��CH4��C02��02�Ț��w��ȡ�
���ڻ���¹�ͨ����������O�����|�ĸߜ�������˙C���ˌ�����O�����|�ضȵęz�y�dz���Ҫ����횙z�y����O�估�ؾ���|�ϸ��c�Ĝضȡ����еĜضșz�y�����ɈD���еļ�����cλ���Ԅ���ɡ���ˣ�����C������Ҫ�z�y����O�����|�Ĝضȕr���C���˵�����݆������ֹͣ��
Ȼ��PTZ�z��C��ƽ���S�̓Aб�S���D���������������O�估��|�ĈD���б��R�e�����c�r���t��ضȂ��������y��ԓ�c�܇��Ĝضȡ����H����O�����|�ĜضȺ͚��w�ĝ�ȴ惦�ڙC���˵Ĵ惦���У����Ҕ���ͨ�^�Oҕ����ݔ�o�h�̲����ˆT������ضȻ���w��Ȳ��ڰ�ȫ�����ȣ���ݔ��һ��������̖���C���ˌ���ԭ·�����ء�
5�Y�Z
�C���������������������a��Ҫ��Ԫ֮һ������Ӱ푰�ȫ�\�е����ضࡢ�L�U�ߣ��¹ʓpʧ���Ɖ��ԏ������c��ͨ�^��������܉��Ѳ�z�C���˱�������ҟo��ֵ�ؾ�����Ҫ���x������܉��Ѳ�z�C���˿�ͨ�^�Ƅӷ�ʽ��Q���⹝�c���������a�����ęz�y����������o��ֵ������ҵ��\�б��ϣ����Ͱ�ȫ�\���L�U��
|

