|

╩ął÷æ¬ė├▒│Š░
ļSų°ŲĮ░Õ’@╩ŠŲ„Ż©░³└©TFT/LCDĪóPDP║═OLEDŻ®Ą╚«aŲĘĄ─│▀┤ńį÷┤¾Ż¼ęį╝░═¼ĢrąĶę¬╝µ╚▌ąĪą═╗»Ė▀Š½Č╚«aŲĘĄ─ąĶŪ¾╝ėäĪŻ¼Ė„┤¾ÅS╔╠ī”ęĢėXī”╬╗╣ż╦ć┴„│╠Ą─žō▌d─▄┴”ĪóęŲäėŲĮ┼_ĘČć·Īóą¦┬╩║═Š½Č╚╠ß│÷┴╦Ė³Ė▀Ą─ę¬Ū¾ĪŻę“┤╦Ż¼UVWī”╬╗ŲĮ┼_│╔×ķØMūŃ▀@ą®ąĶŪ¾ė├æ¶Ą─└ĒŽļ▀xō±ĪŻ
UVWī”╬╗ŲĮ┼_Ż¼ę▓ĘQXXYī”╬╗ŲĮ┼_Ż¼ī┘ė┌╚²▌S▓ó┬ō▀\äėÖCśŗŻ¼═©▀^╚²éĆŠĆąį▀\äė▌SĄ─ģf═¼┐žųŲŻ¼─▄ē“īŹ¼FęįŲĮ├µ╔Ž╚╬ęŌę╗³cĄ─ųąą─ą²▐D║═╚╬ęŌĘĮŽ“ŲĮęŲĪŻ┼õ║ŽCCDęĢėXŽĄĮyŻ¼ŲĮ┼_į┌X-YŲĮ├µ║═θĮŪČ╚▀MąąŠ½├▄╬óš{Ż¼Å─Č°▀_ĄĮĖ▀Š½Č╚ęĢėXī”╬╗╣”─▄Ż¼Š½Č╚┐╔▀_±0.001mmĪŻ
UVWęĢėXī”╬╗ŲĮ┼_ÅVĘ║æ¬ė├ė┌ąĶę¬Ė▀╦┘Ė▀Š½╬╗ų├ī”²RĄ─ųŪ─▄čbéõŻ¼░³└©Ųž╣ŌÖCĪó░ŅČ©ÖCĪóĮzŠWėĪ╦óÖCĪ󊦳Aī”╬╗ĪóPCBŃ@┐ūÖCĪó┘N║ŽÖCŻ©LCD/FPCŻ®ĪóęĢėX─ŻŪąÖCĪóõćļŖ│ž»BŲ¼Ą╚ĪŻ
é„ĮyXYθŲĮ┼_ĘĮ░Ė┤µį┌Ą─ŠųŽ▐ąįŻ║
XYθŲĮ┼_Ą─ĮYśŗŽÓī”║åå╬Ż¼ų„ę¬ė╔ā╔éĆXĪóYų▒ŠĆ▌S║═ę╗éĆą²▐D▌SĮM│╔Ż¼ų„ę¬▀MąąXYŲĮ├µā╚Ą─╬╗ęŲ║═ųąą─ą²▐D▀\äėŻ¼¤oĘ©Ė∙ō■╚╬ęŌę╗³cū°ś╦▀Mąąųąą─ą²▐DŻ¼ė░ĒæŲõį┌Ė▀Š½Č╚ęĢėXī”╬╗ł÷║Žųąæ¬ė├Ż¼ņ`╗Ņąį▓╗Ė▀ĪŻ
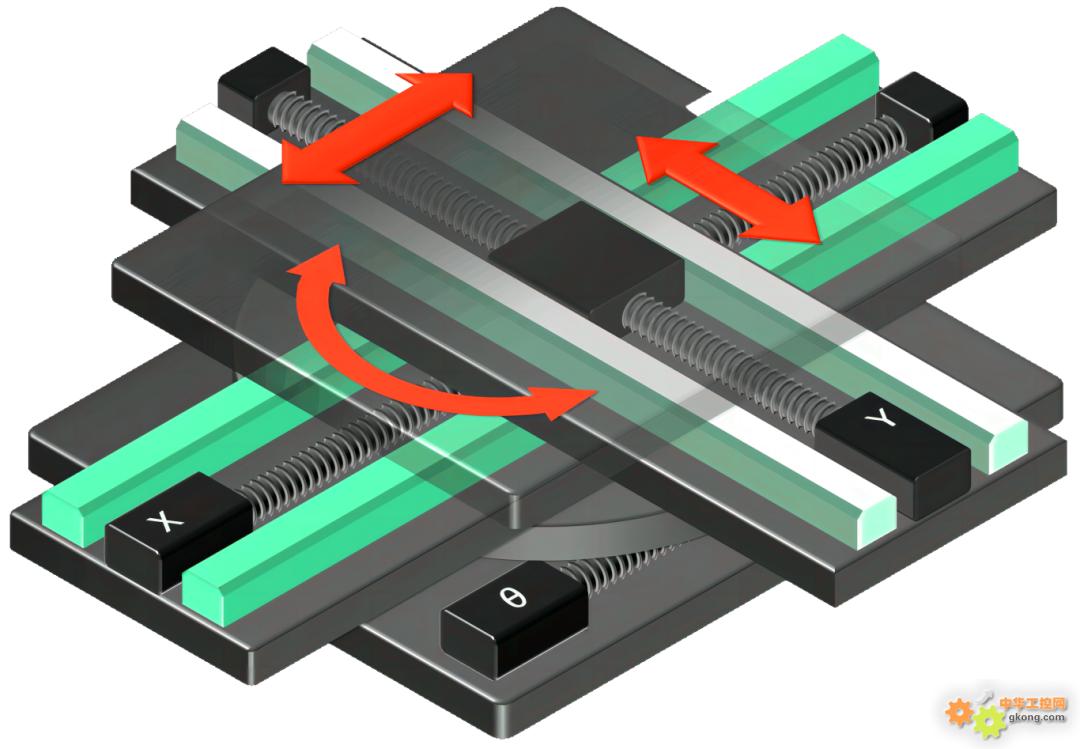
XYθŲĮ┼_Ą─┤╣ų▒Čč»BĮYśŗ╩╣Ą├╣żū„┼_▌^×ķ▒┐ųžŻ¼▓╗▒Ńė┌┐ņ╦┘ęŲäė╗“š{š¹Ż¼▓╗ĘĮ▒Ń┼cŲõ╦¹▀\äė▌S▀Mąą╚┌║ŽŻ¼ĮĄĄ═┴╦ūįäė╗»įOéõķ_░lĄ─ą¦┬╩ĪŻXY θ ŲĮ┼_┼cUVWŲĮ┼_ŽÓ▒╚Ż¼Ųõį┌äéąįĪóžō▌d─▄┴”╝░ųžÅ═Č©╬╗Š½Č╚ĘĮ├µę▓ėą╦∙▓╗ūŃŻ¼Ž▐ųŲ┴╦Ųõį┌Ė▀╦┘Ė▀Š½Ą─ęĢėXī”╬╗ł÷║ŽųąĄ─æ¬ė├ĪŻ
š²▀\äė╝╝ągĮŌøQĘĮ░Ė:
š²▀\äė╝╝ągßśī”¼Fėą╩ął÷ąĶŪ¾Ż¼ķ_░l┴╦ę╗ĘN╗∙ė┌VPLC7ŽĄ┴ąÖCŲ„ęĢėX▀\äė┐žųŲę╗¾wÖCĄ─UVWęĢėXī”╬╗ĮŌøQĘĮ░ĖŻ¼ė├æ¶═©▀^▀xō±ī”æ¬─Żą═Ą─▌S┴ą▒ĒŻ¼╩╣ė├ī”æ¬ųĖ┴ŅĮ©┴óÖCąĄ╩ųš²─µĮŌŻ¼▐DōQ×ķĖ„┬ōäė▌SĄ─ęŲäėŠÓļxĪŻ┼õ║ŽĖ▀Š½Č╚CCDęĢėXŽĄĮyŻ¼╝┤┐╔┐ņ╦┘īŹ¼FĖ▀╦┘Ė▀Š½Ą─ļp─┐╗“╦──┐UVWęĢėXī”╬╗æ¬ė├ĪŻ
š²▀\äė╝╝ągĄ─UVWŲĮ┼_▀\äė┐žųŲ╦ŃĘ©╝µ╚▌╚²ĘN│ŻęŖ─Żą═Ż║FRAME33ĪóFRAME34ĪóFRAME37Ęųäeī”æ¬ā╔ĘNÖCąĄĮYśŗŻ©PRPĪóPPRŻ®Ė·ā╔éĆū°ś╦ŽĄĘĮŽ“Ż©XYYĪóXXYŻ®Ż¼┐╔ęįīŹ¼Få╬▌Sų▒ŠĆ▀\äėĪóā╔▌SŠĆąį▓ÕčaĪóā╔▌SłA╗Ī▓ÕčaĪó┐šķgłA╗ĪĄ╚Å═ļs▀\äėĪŻ
VPLC7ŽĄ┴ąÖCŲ„ęĢėX▀\äė┐žųŲę╗¾wÖC╝»│╔ęĢėX║═▀\┐žė┌ę╗¾wŻ¼╠µ┤·é„ĮyĄ─PC╣ż┐žÖC+ęĢėX▄ø╝■+▀\äė┐žųŲĘĮ░ĖŻ¼ė▓╝■ĮėŠĆĖ³ĘĮ▒ŃŻ¼│╔▒ŠĖ³Ą═ĪŻ┤Ņ▌dš²▀\äė╝╝ąg▀\äė┐žųŲīŹĢrā╚║╦MotionRT7Ż¼║╦ā╚Į╗╗źŻ¼ųĖ┴Ņš{ė├╦┘Č╚┐ņų┴us╝ēŻ¼╠ß╔²╝ė╣ż║═Öz£yą¦┬╩ĪŻ

ę╗ĪóVPLC7ÖCŲ„ęĢėX▀\äė┐žųŲę╗¾wÖCį┌UVWęĢėXī”╬╗Ą─æ¬ė├

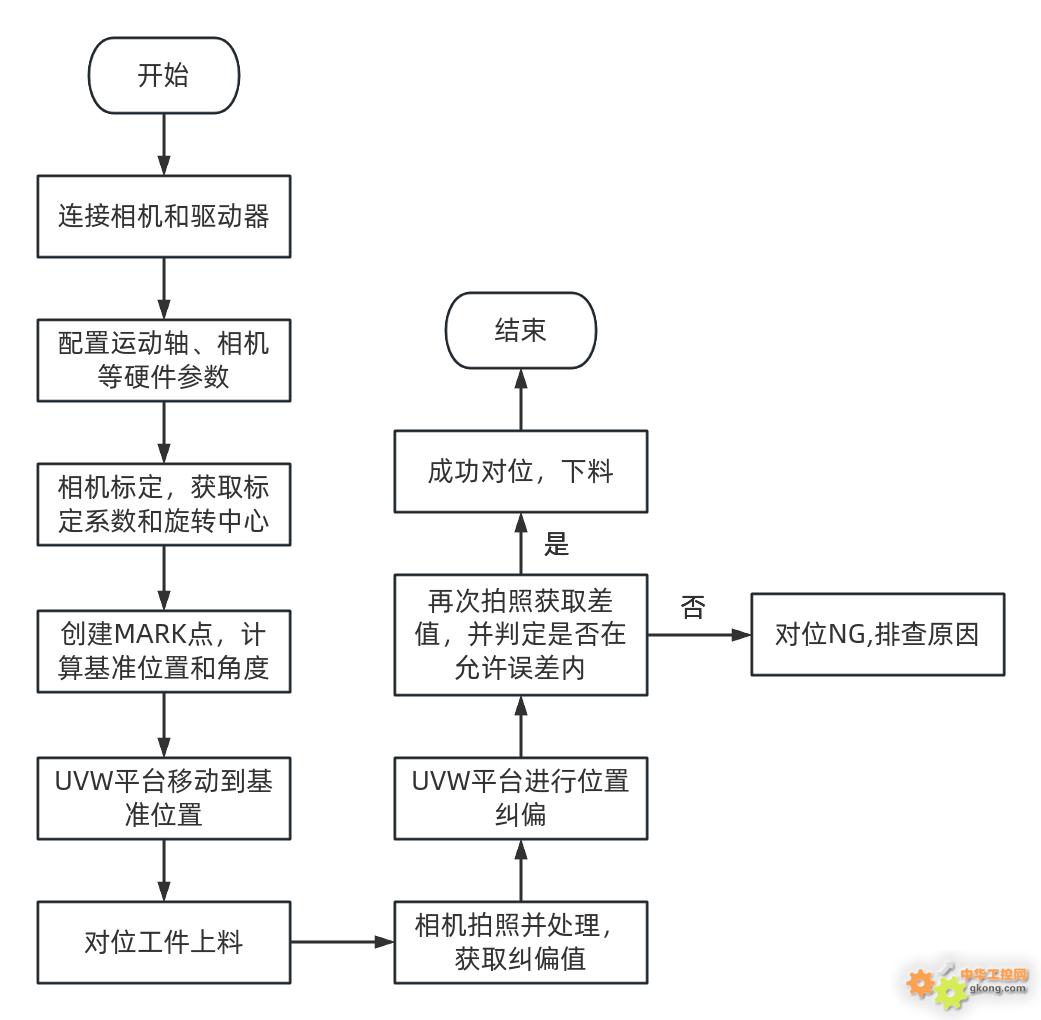
UVWęĢėX╦──┐ī”╬╗æ¬ė├╩ŠęŌłD
é„ĮyĄ─UVWęĢėXī”╬╗ĘĮ░Ė
╣ż┐žÖC+ęĢėX▄ø╝■+▀\äė┐žųŲ┐©Ą─ĮM║ŽĘĮ░ĖŻ¼┼õ╝■ČÓŻ¼ĮėŠĆÅ═ļsŻ¼ęĢėX┼c▀\äė┐žųŲąĶꬎÓ╗źöĄō■Į╗╗źŻ¼╣╩šŽ┼┼▓ķ┬ķ¤®Ż¼▓óŪęČÓ╠ūė▓╝■│╔▒Š║═ŠSūo▌^Ė▀ĪŻ
š²▀\äė╝╝ągUVWęĢėXī”╬╗ĘĮ░ĖįOėŗ
-
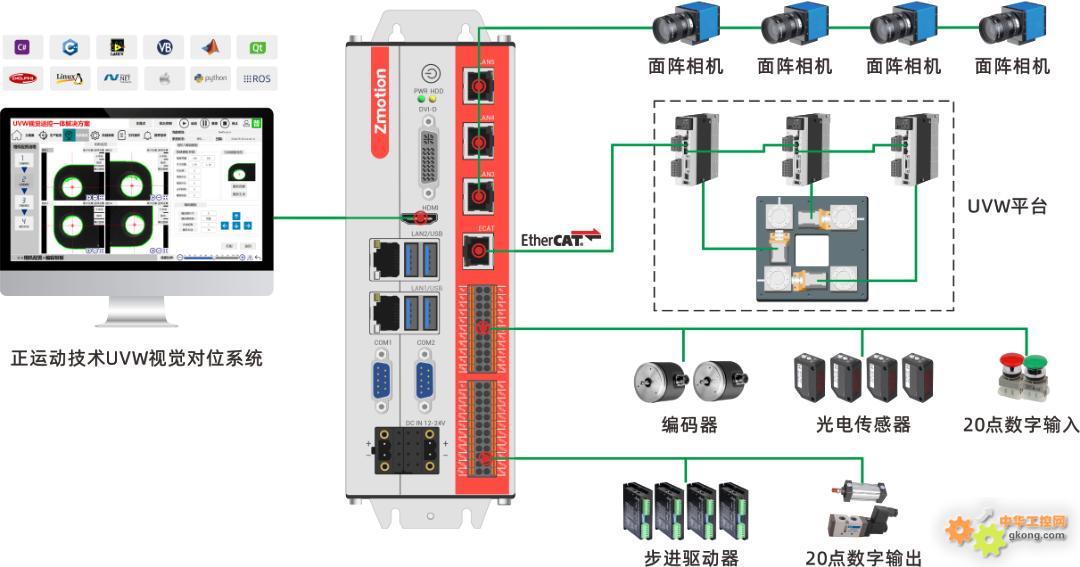
EtherNETĮė┐┌Ż║Ū¦šūŠW┐┌Ż¼═©▀^Į╗ōQÖCūŅČÓ┐╔Įė8éĆŽÓÖCŻ╗
-
EtherCATĮė┐┌Ż║ĮėEtherCAT┐éŠĆ“īäėŲ„Ż¼┐žųŲUVW“īäėļŖÖCŻ╗
-
20DIŻ║ĮėįŁ³cĪóŽ▐╬╗Ą╚é„ĖąŲ„Ż¼ęį╝░ķ_ĻPą┼╠¢Ą╚Ż╗
-
20DOŻ║Įė▌ö│÷ķ_ĻPą┼╠¢Ż¼ę▓┐╔Įėå╬Č╦├}ø_▌ö│÷Ż©500KHzŻ®Ż╗
-
HDMIĮė┐┌Ż║Įė’@╩ŠŲ┴Ż╗
-
USBĮė┐┌Ż║Įė╩¾ś╦µI▒PĄ╚ĪŻ
▀\äė┐žųŲ┼cÖCŲ„ęĢėXīŹ¼F▀^│╠
Ż©1Ż®ÖCŲ„ęĢėX
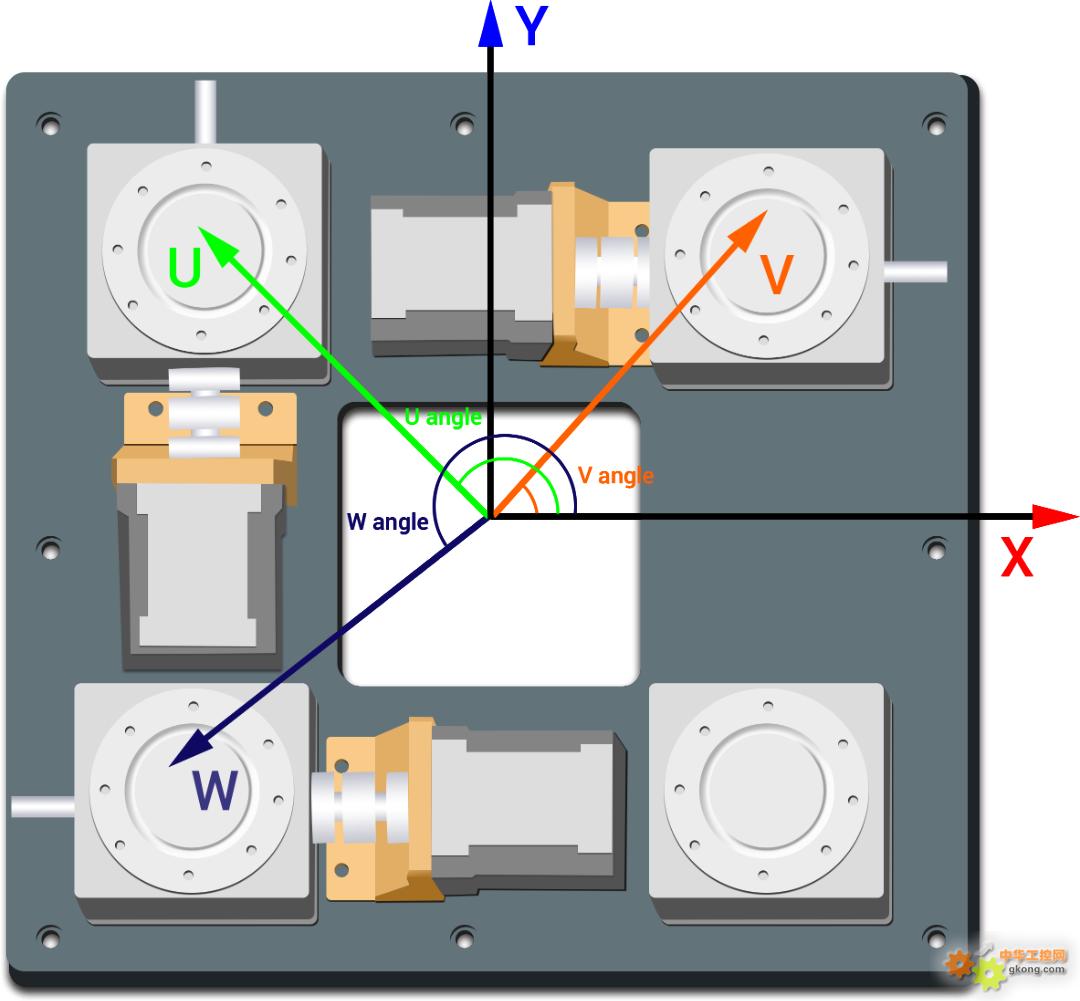
Ė∙ō■Š▀¾wæ¬ė├ąĶŪ¾Ż¼╩╣ė├2éĆ╗“4éĆ├µĻćŽÓÖC▀Mąą┼─özī”╬╗ś╦ėø³cĪŻ═©▀^┼õų├ŽÓÖCģóöĄ║═▀xō±Mark³cäōĮ©─┐ś╦ģ^ė“╝┤┐╔ę╗▓Į═Ļ│╔ś╦Č©Ż¼½@╚Īś╦Č©ŽĄöĄŻ¼║å╗»ęĢėX▓┘ū„▓Į¾EŻ¼ĮĄĄ═┴╦¼Fł÷æ¬ė├Ą─ļyČ╚ĪŻ
ŽĄĮyūįäėėŗ╦Ń│÷─┐ś╦╬╗ų├┼cīŹļH╬╗ų├ų«ķgĄ─Ų½▓ŅŻ©░³└©UĪóVĪóW▌SĄ─╬╗ų├Ų½ęŲ╝░ θ ▌SĄ─ĮŪČ╚Ų½ęŲŻ®Ż¼īŹ¼FUVWęĢėXī”╬╗╣”─▄ĪŻ

Ż©2Ż®▀\äė┐žųŲ
▀xō±ī”æ¬─Żą═Ą─▌S┴ą▒ĒŻ¼įOų├ĻP╣Ø▌SģóöĄ╝░╠ōöM▌SģóöĄŻ¼┤_Č©ÖCąĄ╩ų┴Ń³c╬╗ų├(RAME33ąĶę¬▒ŻūCVW▌S╩Ū╦«ŲĮĄ─ĪŻŲĮ┼_╔Ž╚╬ęŌę╗³c┐╔ū„×ķ┴Ń³cŻ¼▒ŻūCĮYśŗģóöĄš²┤_╝┤┐╔)Ż¼ų«║¾╩╣ė├ī”æ¬ųĖ┴ŅĮ©┴óÖCąĄ╩ųš²─µĮŌŻ¼ėŗ╦Ń│÷UVWŲĮ┼_Ą─╚²▌SįŁ╩╝╬╗ų├┼c2éĆ╗“4éĆ├µĻćŽÓÖC½@Ą├Ą─ŽÓī”ū°ś╦ų«ķgĄ─ĻPŽĄĪŻ
į┌┤_Č©ΔUĪóΔV║═ΔW║¾Ż¼ūŅ║¾UVWŲĮ┼_▒Ń─▄čž╚²éĆ▌SŠĆąįĄžł╠ąąą²▐D║═ŲĮęŲäėū„Ż¼ęįčaāö╬╗ų├║═ĮŪČ╚Ą─Ų½▓ŅŻ¼īŹ¼FĖ▀╦┘Ė▀Š½Ą─ęĢėXī”╬╗æ¬ė├ĪŻ

UVWęĢėXī”╬╗╣ż╦ć┴„│╠
ĘĮ░Ė║╦ą─ā×ä▌
-
╝»│╔ÖCŲ„ęĢėXĪóUVW┐žųŲ║═▀\äė┐žųŲė┌ę╗¾wŻ¼ė▓╝■ĮėŠĆĖ³ĘĮ▒ŃŻ¼│╔▒ŠĖ³Ą═Ż╗
-
▀\äė┐žųŲīŹĢrā╚║╦Ż¼║╦ā╚Į╗╗źŻ¼ųĖ┴Ņš{ė├╦┘Č╚┐ņų┴us╝ēŻ¼╠ß╔²╝ė╣żą¦┬╩Ż╗
-
ā╚ų├UVWŲĮ┼_╦ŃĘ©Ż¼┐═æ¶╩╣ė├Ė³ĘĮ▒ŃŻ¼╠ß╔²╣ż│╠Ĥķ_░lą¦┬╩Ż╗
-
═©▀^ūįäėąŻ£╩┤_Č©ŽÓÖC║═╣żū„┼_ų«ķgĄ─╬╗ų├ĻPŽĄŻ¼╠ßĖ▀╣Ø┼─Ż╗
-
ā╚ų├ęĢėX╦ŃĘ©Ż¼Š½Č╚Ė▀Ż¼ļpŽÓÖCČ©╬╗Š½Č╚į┌2éĆŽ±╦žęįā╚Ż╗
-
Įyę╗Ą─API║»öĄĮė┐┌Ż¼▀mė├Ė„ĘNPC╔Ž╬╗ÖCšZčįķ_░lŻ¼ęūė┌┐═æ¶╝»│╔ĄĮ┼õéõ¼FėąŽĄĮyųąŻ¼äōĮ©Ė▀╦┘ĪóĖ▀Š½Ą─ęĢėXī”╬╗ŽĄĮyĪŻ

ĮŌøQĘĮ░Ėė▓╝■┼õų├

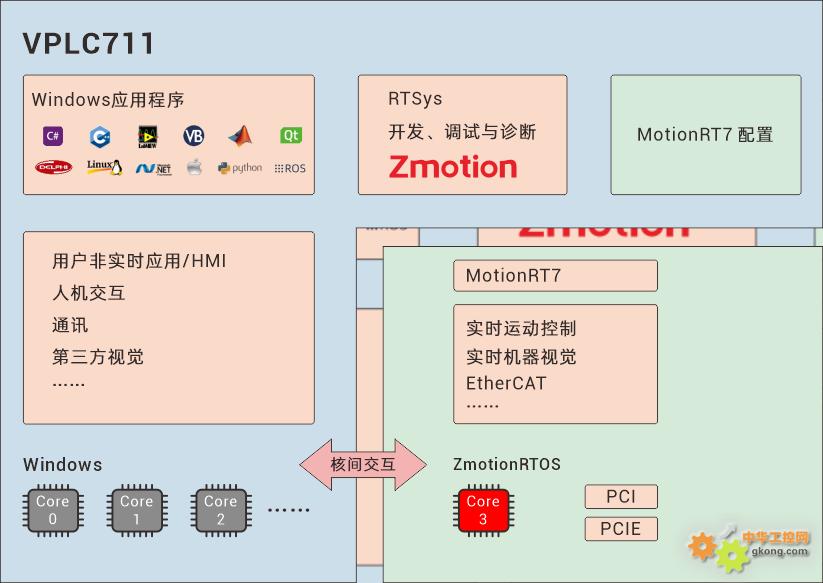
Č■ĪóVPLC7ŽĄ┴ąÖCŲ„ęĢėX▀\äė┐žųŲę╗¾wÖC
š²▀\äė╝╝ągVPLC7ŽĄ┴ąÖCŲ„ęĢėX▀\äė┐žųŲę╗¾wÖC╩Ūę╗┐Ņ╗∙ė┌x86ŲĮ┼_║═Windows▓┘ū„ŽĄĮyĄ─Ė▀ąį─▄ÖCŲ„ęĢėXEtherCAT▀\äė┐žųŲŲ„Ż¼┐╔├ōÖC▀\ąąŻ¼ų¦│ųžSĖ╗Ą─IO┐žųŲŻ¼30+ÖCŲ„╚╦╦ŃĘ©Ż¼ęį╝░ęĢėX║═▀\äė┐žųŲ╣”─▄Ż¼┤¾Ę∙║å╗»ęĢėX┼c▀\äė┐žųŲĒŚ─┐Ą─┼õų├┴„│╠ĪŻ
VPLC7ŽĄ┴ąÖCŲ„ęĢėX▀\äė┐žųŲę╗¾wÖCĄ─░▓čb┼c▓ąČ▀^│╠▒ŃĮ▌Ż¼š╝Ąž┐šķgąĪŻ¼▀Ć─▄┼cŲõ╦³┐žųŲå╬į¬▓┐╝■Ż©╚ń╦┼Ę■“īäėŲ„Īóé„ĖąŲ„ĪóŠÄ┤aŲ„Īó┐žųŲķyĄ╚Ż®║═MESŽĄĮy¤o┐p╝»│╔Ż¼╠ß╣®ę╗éĆ═Ļš¹Č╦ĄĮČ╦Ą─ęĢėX▀\äė┐žųŲĮŌøQĘĮ░ĖĪŻ

-
┐╔▀x6-64▌S▀\äė┐žųŲŻ©├}ø_+EtherCAT┐éŠĆŻ®
-
ā╚ų├īŹĢrā╚║╦MotionRT7Ż¼ų¦│ųĄ┌╚²ĘĮęĢėX▄ø╝■
-
░Õ▌d20┬Ę═©ė├▌ö╚ļ(Ųõųą10┬Ę×ķĖ▀╦┘▌ö╚ļ)Ż¼20┬ĘĖ▀╦┘▌ö│÷
-
╠ß╣®ę╗¾w╗»ķ_Ę┼╩ĮIPCą╬æBĄ─īŹĢr▄ø┐žųŲŲ„/▄øPLC╝»│╔Ą─ęĢėX+▀\äė┐žųŲĮŌøQĘĮ░Ė
-
ČÓ║╦▓óąą▀\╦ŃŻ¼─▄ē“Ė▀ą¦╠Ä└Ē▀\äė┐žųŲŻ¼ÖCŲ„ęĢėXĄ╚ūįäė╗»įOéõ║╦ą─╚╬äš

š²▀\äė╝╝ągīŻūóė┌▀\äė┐žųŲ╝╝ąg蹊┐║══©ė├▀\äė┐žųŲ▄øė▓╝■«aŲĘĄ─čą░lŻ¼╩Ūć°╝ę╝ēĖ▀ą┬╝╝ągŲ¾śIĪŻš²▀\äė╝╝ągģR╝»┴╦üĒūį╚A×ķĪóųą┼dĄ╚╣½╦ŠĄ─ā׹Ń╚╦▓┼Ż¼į┌łį│ųūįų„äōą┬Ą─═¼ĢrŻ¼ĘeśO┬ō║ŽĖ„┤¾Ė▀ąŻģf═¼▀\äė┐žųŲ╗∙ĄA╝╝ągĄ─蹊┐Ż¼╩Ūć°ā╚╣ż┐žŅIė“░lš╣ūŅ┐ņĄ─Ų¾śIų«ę╗Ż¼ę▓╩Ūć°ā╚╔┘ėąĪó═Ļš¹šŲ╬š▀\äė┐žųŲ║╦ą─╝╝ąg║═īŹĢr╣ż┐ž▄ø╝■ŲĮ┼_╝╝ągĄ─Ų¾śIĪŻų„꬜IäšėąŻ║▀\äė┐žųŲ┐©_▀\äė┐žųŲŲ„_EtherCAT▀\äė┐žųŲ┐©_EtherCAT┐žųŲŲ„_▀\äė┐žųŲŽĄĮy_ęĢėX┐žųŲŲ„__▀\äė┐žųŲPLC_▀\äė┐žųŲ_ÖCŲ„╚╦┐žųŲŲ„_ęĢėXČ©╬╗_XPCIe/XPCIŽĄ┴ą▀\äė┐žųŲ┐©Ą╚Ą╚ĪŻ
|

