

如何通過智能軟件和硬件解決方案克服實時立體視覺中的挑戰
http://www.sharifulalam.com 2025-05-13 11:23 來源:TELEDYNE
立體視覺是一種強大的成像技術,通過使用兩臺或多臺相機以略微不同的角度拍攝,模擬人類通過雙眼感知深度的方式,從而捕捉環境的三維結構。這項技術能夠提供全視野的高密度三維測量,并在非結構化和動態環境中表現出色,特別適用于工業機器人應用。
從料箱撿取到自主導航,立體視覺使得各種機器人應用成為可能。然而,在實時應用場景中部署立體視覺系統時,常常面臨以下幾個挑戰:
圖像處理的高計算需求
對低延遲性能的要求
環境變數,如陰影、眩光或光線不足
嵌入式機器人平臺上有限的處理能力
智能解決方案:結合軟件效率與硬件性能
為應對這些挑戰,必須通過優化算法與專用硬件的結合來提供解決方案。在深度估計方面,像半全局匹配(SGM)這樣的算法,在速度和精度之間提供了良好的平衡。同時,深度學習技術可以進一步優化視差圖,提升深度精度,特別是在紋理較少或被遮擋的區域。
立體圖像中的噪聲是另一個常見問題。噪聲通常由光照條件或鏡頭偽影引起,但可以通過邊緣保持濾波器(如雙邊濾波器或引導濾波器)來最小化。這些濾波器在去除噪聲的同時,能夠保留重要的結構細節,這對于高精度機器人任務至關重要。
然而,即使使用優越的軟件,也需要強大的硬件支持才能發揮出色效能。這時,像Bumblebee X這樣的機載處理立體相機就顯得尤為重要。它通過在設備上直接處理計算密集型任務(如立體匹配、圖像校正和視差計算),將主機器人處理器的負載卸載,從而釋放出更多系統資源用于AI決策、運動規劃或傳感器融合,使機器人運行更加高效、智能。
高分辨率立體相機在實時系統中的計算負載管理
平衡實時響應與有限計算能力,尤其是在高精度應用(如外科導航)中,一直是機器人技術面臨的重要挑戰。高效處理傳感器數據至關重要。現代立體相機通過提供預處理的深度圖,顯著減少了帶寬需求,并簡化了系統集成,避免了將原始圖像數據傳輸給系統。
盡管GPU在并行計算中表現出色且被廣泛應用,但立體匹配是一項計算密集型任務,尤其是在其他AI或控制任務并行執行時,容易迅速消耗大量GPU資源。在這種情況下,基于FPGA的處理方式提供了顯著的優勢。通過將視覺處理任務卸載到專用的FPGA平臺,像Bumblebee X這樣的系統能夠優化計算負載,從而實現更平穩、更快速和更高效的運行,特別是在資源受限的嵌入式環境中。
應對惡劣和不可預測環境中的挑戰
戶外和工業環境對立體視覺系統提出了巨大的挑戰。強烈陽光、深陰影、霧霾和雨水等因素會導致圖像質量下降,并影響深度精度。與此相對,主動傳感器(如結構光或飛行時間(ToF)相機)在這些環境中往往難以達到理想的效果,因為它們對環境光干擾極為敏感。
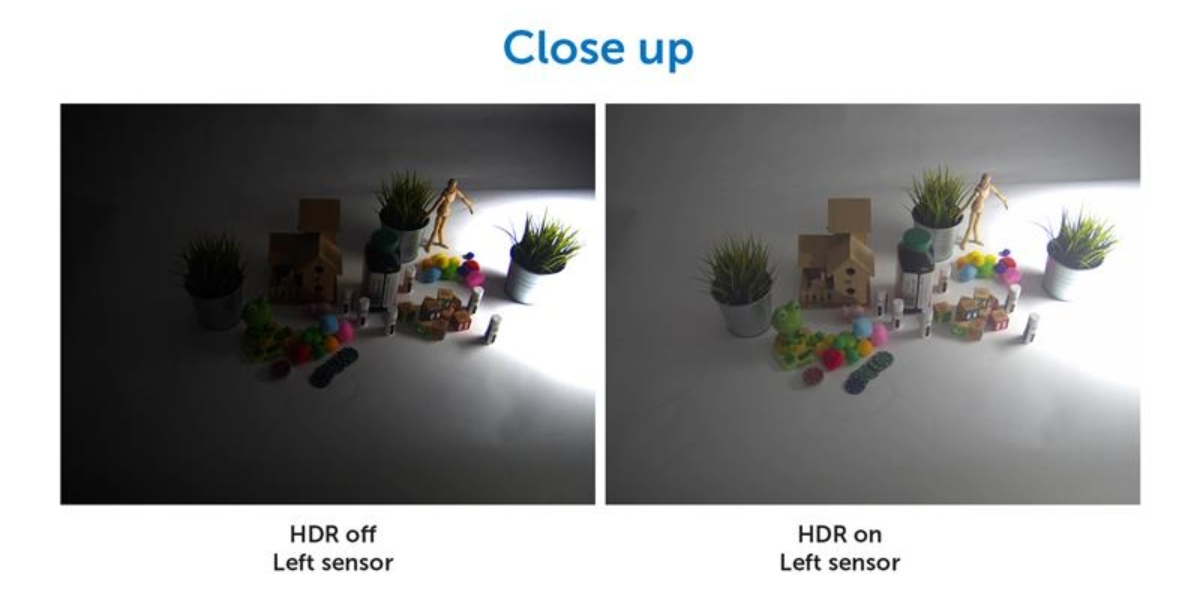
相比之下,依賴自然圖像對比的被動立體系統在這些環境中表現得更為穩定,因此在光照變化較大的情況下具有更強的魯棒性。結合高動態范圍(HDR)成像技術,立體相機能夠在不同亮度級別之間捕捉豐富的細節,從而在高光和陰影區域都保留關鍵信息。
對于需要進一步提升圖像清晰度的場景,基于深度學習的去噪技術也可以改善深度圖質量。然而,這些方法計算量大,并且需要經過精心準備的訓練數據才能達到出色的效果。
盡管如此,在不同的應用場景中,并不存在一種“完美”的深度感知解決方案。每個應用場景,無論是自主導航、物體追蹤,還是高精度的抓取和放置,都需要結合多種技術進行量身定制。然而,從設計一個具備HDR能力的高質量被動立體系統開始,將為在動態和不可預測環境中提供穩定性能奠定堅實基礎。
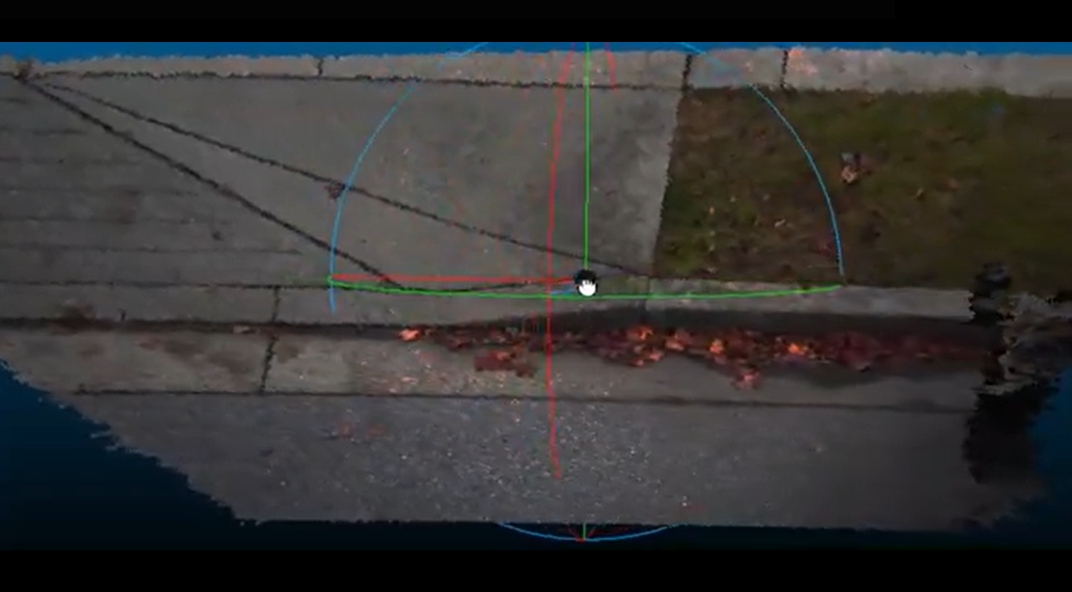
高分辨率3D點云在路面檢查中的應用
解決工業環境中的標定漂移問題
保持立體視覺系統的長期標定精度至關重要,但這在實際應用中往往充滿挑戰。在實際部署中,振動、溫度變化和物理操作等因素可能會導致標定漂移,即相機的內外參數發生細微變化,從而影響深度的準確性。
在機器人應用中,哪怕是微小的標定誤差,也可能會導致托盤堆疊不穩定、抓取失敗或導航錯誤等問題。為減緩這些問題,可以采取以下措施:
使用熱穩定的材料來設計相機
設計能夠減少振動的支架
將定期重新標定納入預防性維護計劃
Bumblebee X憑借超過20年的標定經驗和強大的標定算法,專為工業級可靠性而設計。其堅固的外殼和熱穩定的機械設計,以及工廠標定的鏡頭,有效減少了標定漂移,確保在長時間運行中保持穩定性能。這種精心設計確保了即便在惡劣環境下,系統仍能持續提供一致的性能,減少停機時間,并在倉儲自動化、托盤化和機器人引導等應用中實現出色的工作效率。
最后思考
立體視覺使機器人能夠實時感知深度,提供豐富的3D數據,這對于動態環境中的自動化至關重要。然而,要充分發揮其潛力,僅僅依靠兩臺相機是不夠的。高分辨率立體成像技術需要在智能軟件和專用硬件之間找到恰當的平衡,以克服現實環境中的各種挑戰。
從應對高計算負載、處理復雜光照環境,到確保長期標定精度,每一個環節都至關重要。這正是像Bumblebee X這樣先進平臺設計的核心—不僅僅為了捕捉圖像,更是為了在機載系統中解決立體視覺的關鍵技術難題。
相關新聞
- ? 中國工業機器視覺市場規模預計到2029年將超過630億元
- ? VisionChina2025(北京)機器視覺大會圓滿閉幕!
- ? 視無界·智共生——VisionChina2025(北京)機器視覺大會盛大開幕
- ? Teledyne Space Imaging 發布通過航天級篩選的工業圖像傳感器
- ? 為何選擇VisionChina2026(上海)機器視覺展
- ? 機器視覺龍頭IPO獲受理
- ? 主營業務穩健 唐源電氣聚焦AI機器視覺加速發展
- ? 智啟新程,“視”界無疆——VisionChina2025(上海)機器視覺展完美收官
- ? 智能工業機器人第一股聯合索威爾成功登陸美股:開啟工業領域智能機器人新篇章,引領行業智能化變革!
- ? 智啟新程,“視”界無疆——VisionChina2025(上海)機器視覺展完美收官
編輯精選


