EIO24088-V2��EIO16084�Uչģ�K������\�ӵ���վ��������ʹ�÷֞���������һ�����M��Ӳ���Ӿ����ڶ�����������ʼ������EtherCATͨӍ�B�ӣ���ʼ������Ҫ���Uչ���S�YԴ��IO�YԴ���M��ӳ���ֹ�c���������YԴ�a(ch��n)���_ͻ����������ͨ�^����(y��ng)ָ���x��IO������늙C�\�ӡ�
�������\��С���ֽo��ҷ���һ��EIO24088-V2��EIO16084�����RTSys�����M�����ú�ʹ�á�
EIO24088-V2�Uչģ�KӲ����B
EIO24088-V2�����Uչģ�K��EtherCAT����������ʹ�õĔUչģ�K������(sh��)��IO���}�_�S�YԴ������Ҫ�Uչ���ӵĕr��������ͨ�^EtherCAT�����B�Ӷ���EtherCAT�Uչģ�K�M�ДUչ����������ͨ�^ӳ�侎ֱ̖���L��EIO24088-V2��IO�YԴ���S�YԴ��

-
֧��8���}�_�S�M�ДUչ��
-
֧�֔Uչ24·��(sh��)����ݔ���8·��(sh��)����ݔ����ÿ���}�_�S�������1·��(sh��)����ݔ���1·��(sh��)����ݔ���ɹ����ã�
-
�}�_ݔ��ģʽ�鷽��/�}�_���p�}�_ݔ����
-
ÿ�S���ݔ���}�_�l��10MHz��
-
�}�_�S�����ݔ�������ݔ������_300mA����ֱ���(q��)�Ӳ���늴��y��
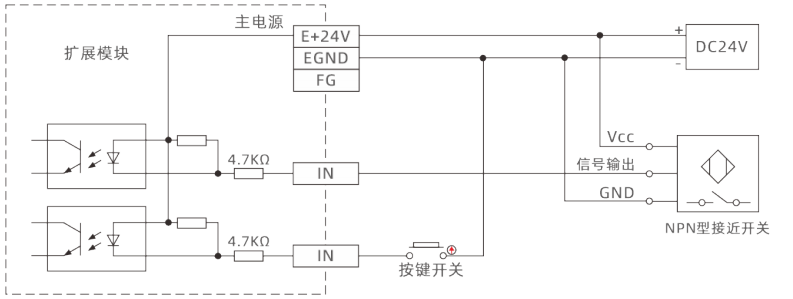
��(y��ng)�ÿ�D������ʾ��
EIO16084�Uչģ�KӲ����B
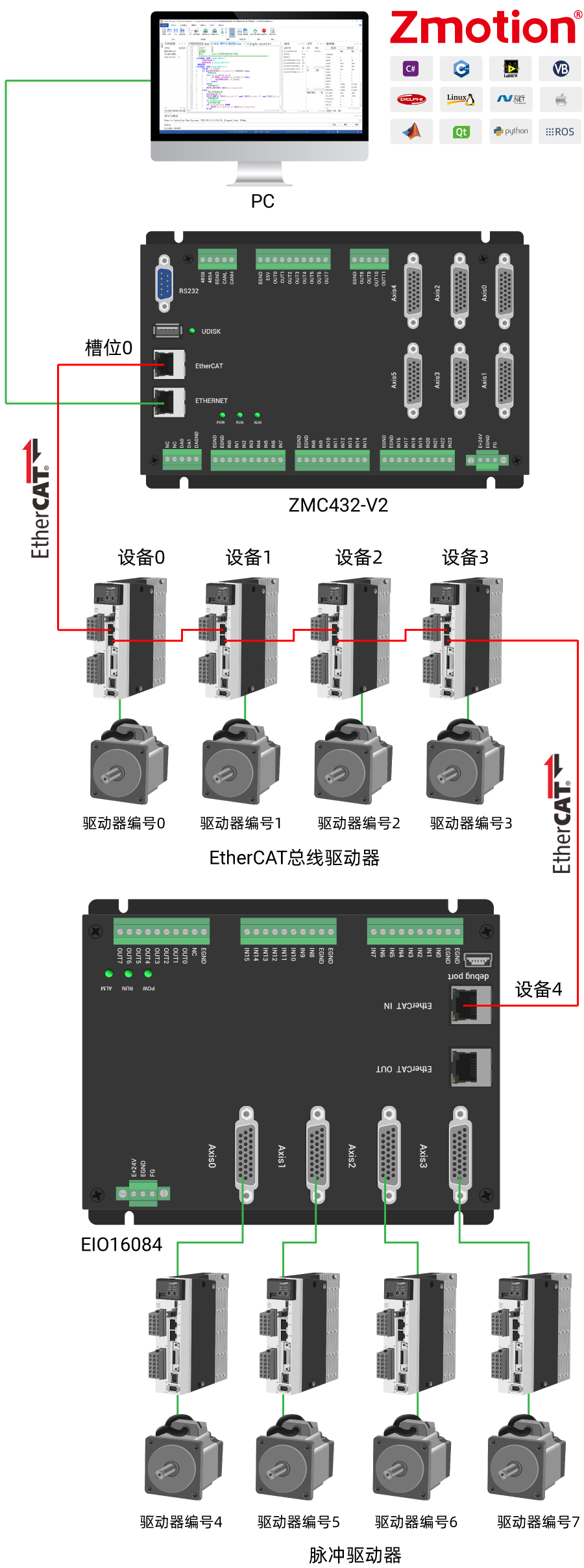
EIO16084�����Uչģ�K��EtherCAT����������ʹ�õĔUչģ�K������(sh��)��IO���}�_�S�YԴ������Ҫ�Uչ���ӵĕr��������ͨ�^EtherCAT�����B�Ӷ���EtherCAT�Uչģ�K�M�ДUչ����������ͨ�^ӳ�侎ֱ̖���L��EIO16084��IO�YԴ���S�YԴ��

-
֧��4���}�_�S�Uչ��
-
֧�֔Uչ16·��(sh��)����ݔ���8·��(sh��)����ݔ����ÿ���}�_�S�������2·��(sh��)����ݔ���2·��(sh��)����ݔ��ɹ����ã�
-
�}�_ݔ��ģʽ�鷽��/�}�_���p�}�_��
-
ÿ�S���ݔ���}�_�l��10MHz��
-
�}�_�S�����ݔ�������ݔ������_300mA����ֱ���(q��)�Ӳ���늴��y��
��(y��ng)�ÿ�D������ʾ��
һ���ӿ��f��
1��EtherCAT����ͨӍ�ӿڵĽӾ�
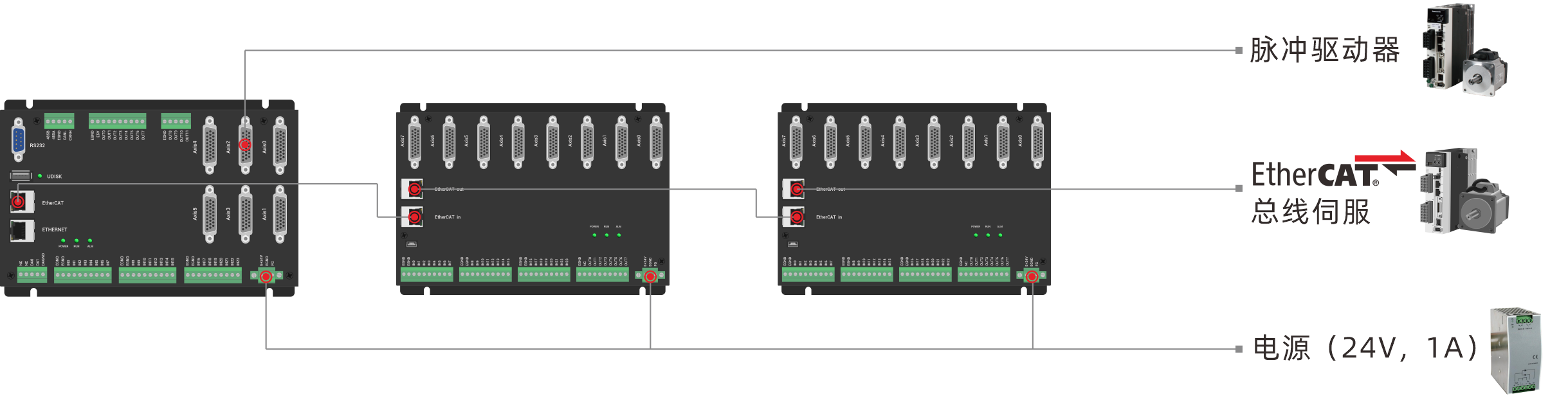
EIO24088-V2���ɂ�EtherCAT�����ӿڣ��Ӿ��rע��EtherCAT IN�B�������������ϼ�ģ�K��EtherCAT OUT�B����һ���Uչ�壬IN��OUT�ڲ��ɻ��á�
2��ͨ��ݔ���
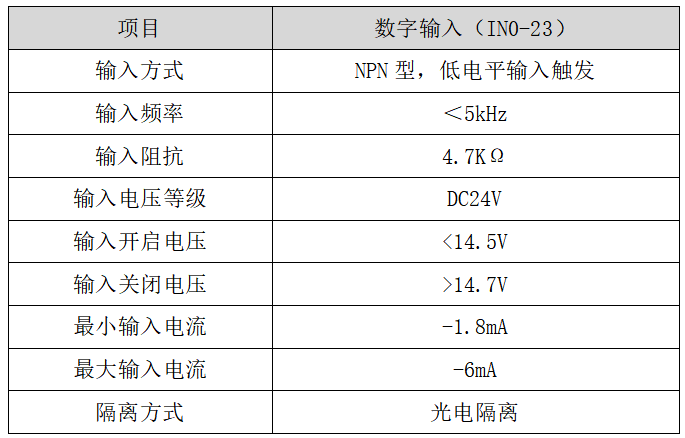
EIO24088-V2��24��ͨ��ݔ��ڣ�ݔ�����Ҫ��ʹ��NODE_IOָ������IO��ַ��̖����ͨ�^�������˲�����ͨ��ݔ���IN�ă�(n��i)���·�����D���£�ݔ��څ���(sh��)��Ҋ�±���
ͨ��ݔ���IN�ă�(n��i)���·�����D��
ݔ��څ���(sh��)�f����
3��ͨ��ݔ����
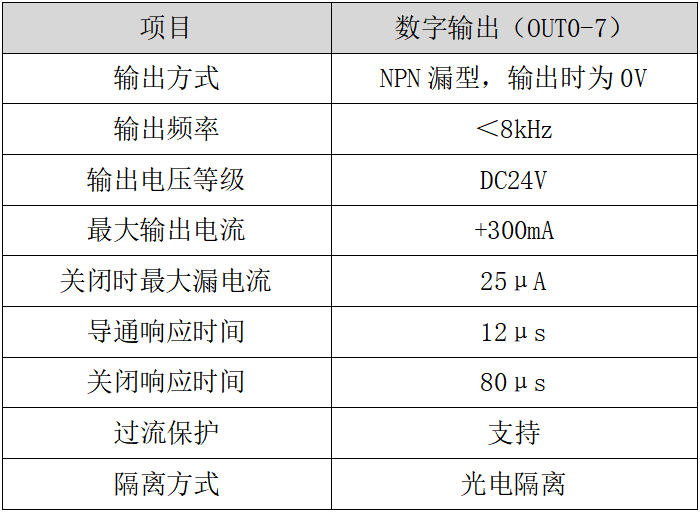
EIO24088-V2��8��ͨ��ݔ���ڣ�ݔ������Ҫ��ʹ��NODE_IOָ������IO��ַ��̖�����ͨ�^�������˲�����NODE_IOָ��ʹ��һ�α�����ú�ݔ���ݔ������ͨ��ݔ����OUT�ă�(n��i)���·�����D���£�ݔ���څ���(sh��)��Ҋ�±���
ͨ��ݔ����OUT�ă�(n��i)���·�����D��
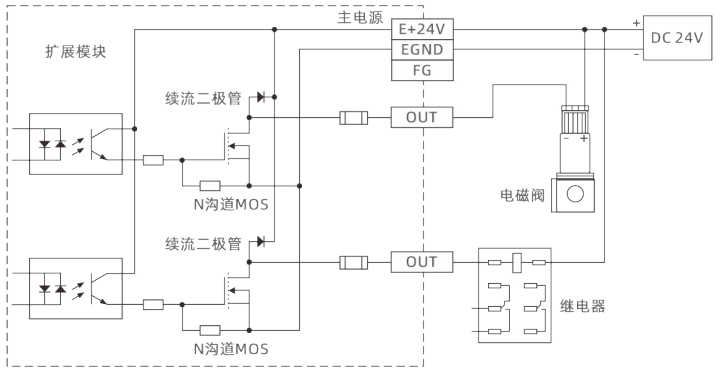
ݔ���څ���(sh��)�f����
4���S�ӿ�
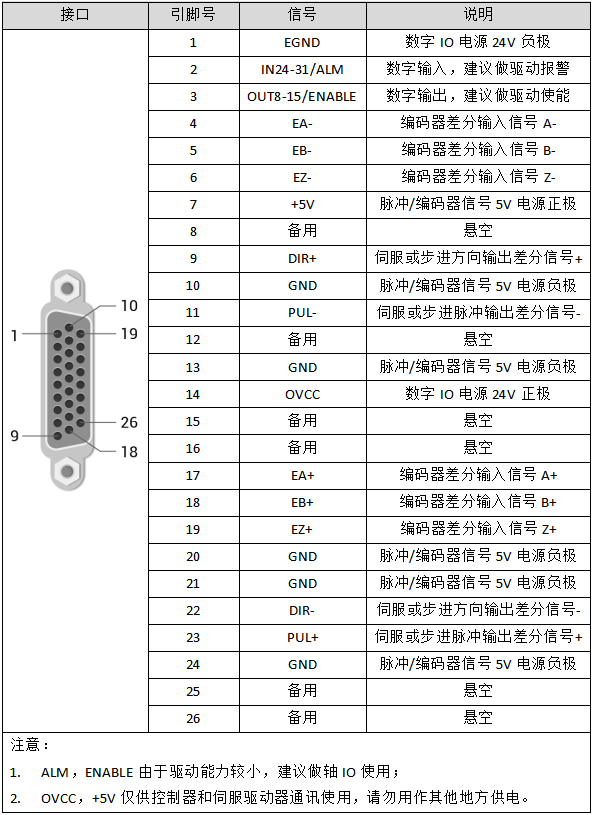
EIO24088-V2���S�ӿ���8��������DB26��_���S�ӿڰ�������}�_ݔ����̖�Ͳ�־��a��ݔ����̖��ͬ�r��һ·ͨ��ݔ��ں�һ·ͨ��ݔ���ڣ�EIO16084�Ѓ�·ͨ��ݔ��ں̓�·ͨ��ݔ����̖����
��_���x�f����
����ͨ�^��(sh��)��(j��)�ֵ��е�6013h����EIO�Uչ��ֱ��ʹ���c�澯��ȱʡ��ʹ�ã���Ҫ����������������
���������Ӿ�����
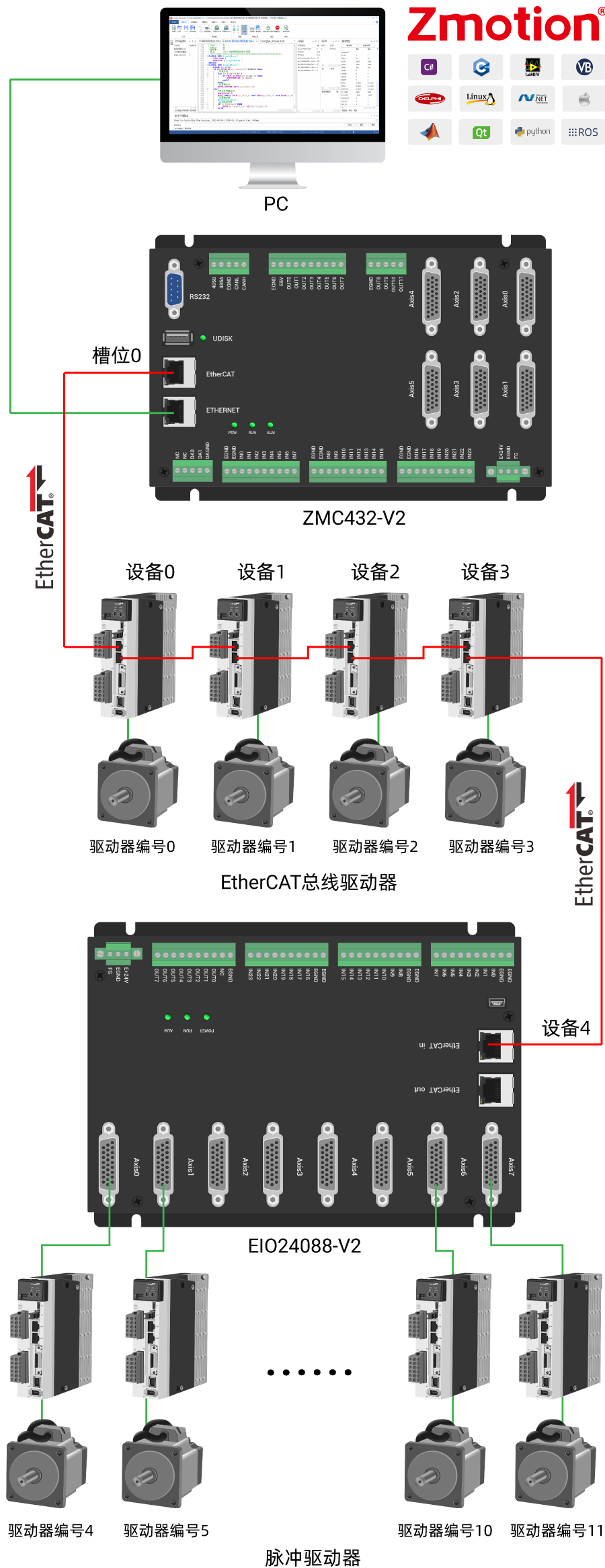
EIO24088-V2�Uչģ�K�Ӿ�Ҏ(gu��)�t��EIO24088-V2�ɽӵ�EtherCAT�����ϵ����⹝(ji��)�c��
EIO24088-V2�鿂���ϵ�һ���O(sh��)�九(ji��)�c���ɽ���8���}�_���(q��)�������(q��)��������AXIS 0��AXIS 7��������ξ�̖��������Ŀ����ϵ��(q��)������̖Ҏ(gu��)�t����Ҫ�M���Sӳ�䡣
�(q��)������ʹ����̖���}�_�ӿڃ�(n��i)��ͨ��ݔ���ڣ�ֱ��ͨ�^����������OPָ���ʹ�ܣ���ʹ��SDOָ�����Ô�(sh��)��(j��)�ֵ�6013h�е�BIT8��1��鼴���Ԅ�ʹ�ܣ����������o��ֱ�ӿ��ƌ���(y��ng)��ݔ���ځ�ʹ�ܣ�ֻ��WDOG��1������(y��ng)�S��AXIS_ENABLE��1���ɡ�
ע�⣺�S�Uչģ�K��ʹ�Â���(sh��)���ǟo���Ƶģ������������ɔUչ������S��(sh��)��
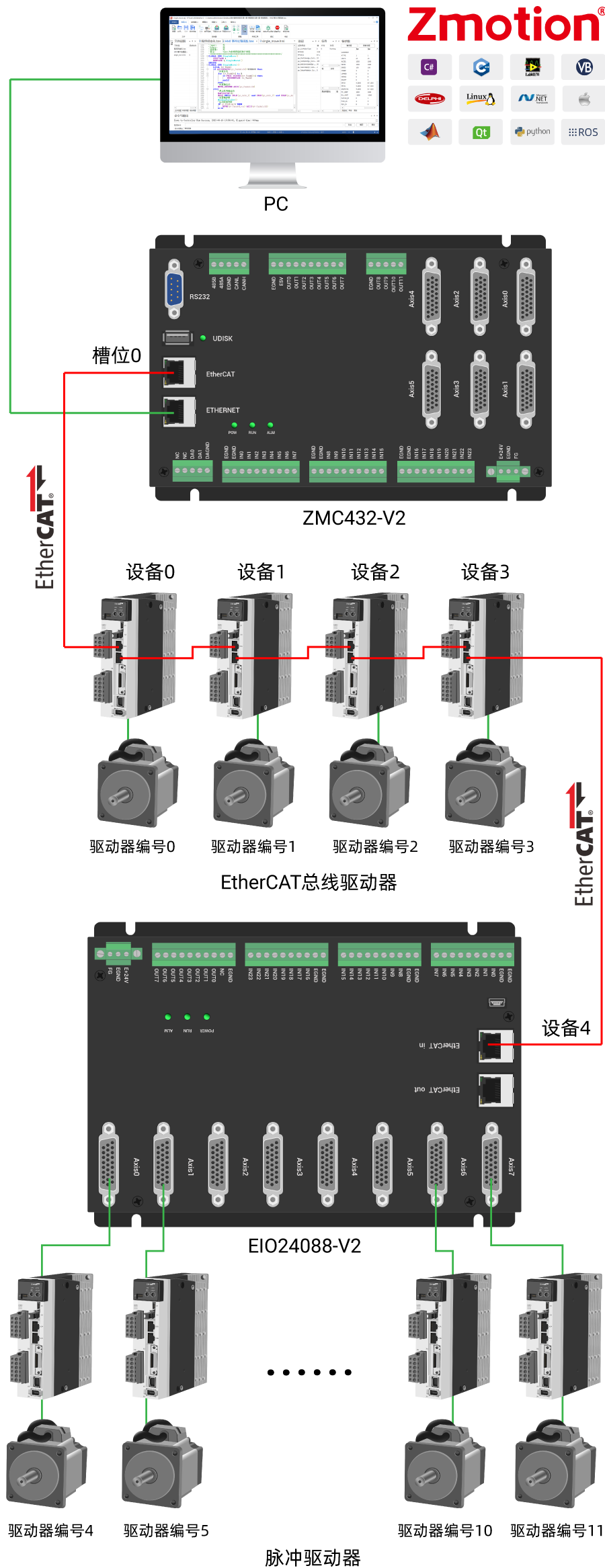
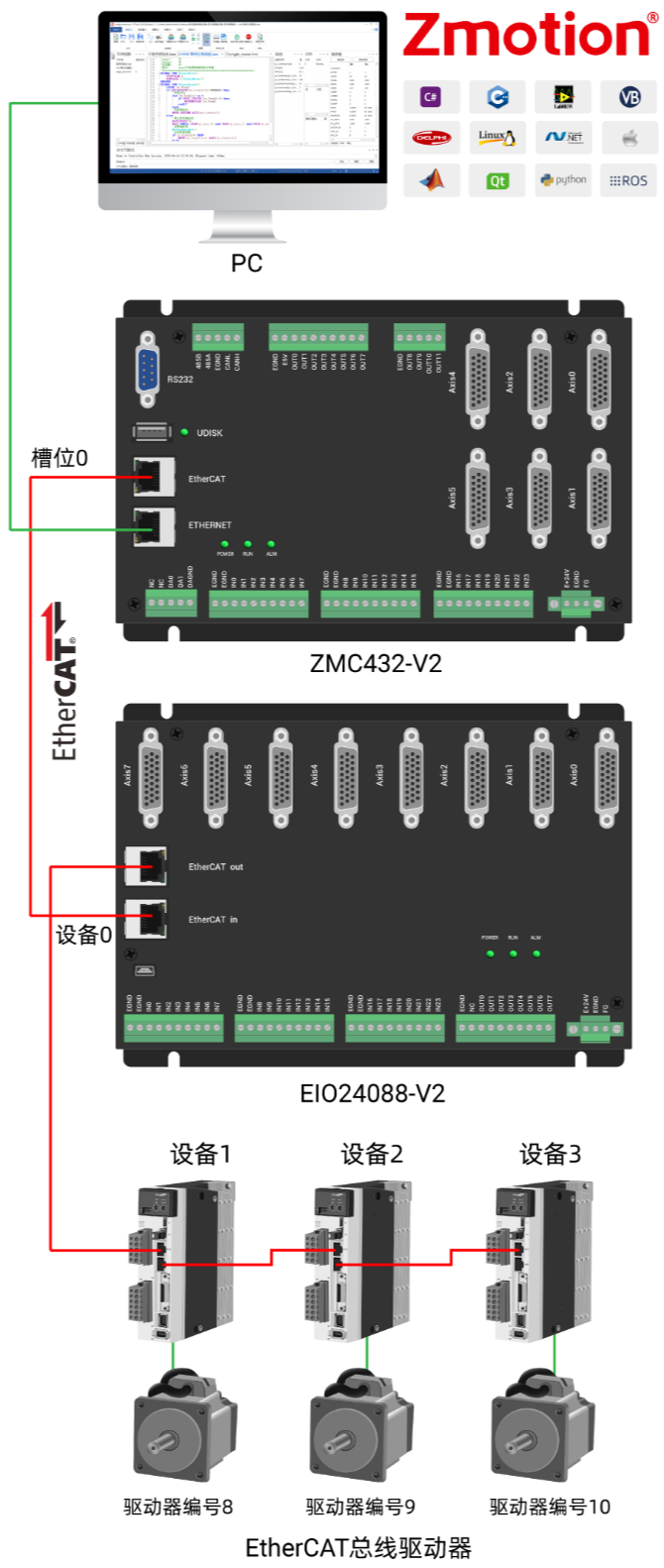
ZMC432-V2���w��6���}�_�S��ͨ�^EtherCAT�Uչ�˹�(ji��)�c0��1��2��3�Ă������S����(ji��)�c4�˂������D(zhu��n)�}�_�S���Uչ�S�ϵ�AXIS0-7������(y��ng)�D���(q��)������̖4-11���քe�ք�ӳ����S̖10-17����������EIO�Uչģ�K���(q��)�����ĽӾ��������D��
�漰�Ŀ������P(gu��n)ָ���(sh��)�������£�
1����λ̖(slot)
��λ̖��ָ�������Ͽ����ӿڵľ�̖��ȱʡ��0�������������ж��������ӿڕr���ھ�����l(f��)��?*SLOT�鿴��
�\�ӿ�����֧�ֆο����r����λ̖��0��
֧���p�����r��EtherCAT������λ̖��0��RTEX������λ̖��1��
2���O(sh��)��̖(node)
�O(sh��)��̖��ָһ����λ���B�ӵ������O(sh��)��ľ�̖����0�_ʼ�����O(sh��)���ڿ����ϵ��B������ԄӾ�̖������ͨ�^NODE_COUNT(slot)ָ��鿴�������B�ӵ��O(sh��)�係��(sh��)��
3���(q��)������̖
���������Ԅ��R�e����λ�ϵ��(q��)��������̖��0�_ʼ�����(q��)�����ڿ����ϵ��B������ԄӾ�̖��
�(q��)������̖�c�O(sh��)��̖��ͬ��ֻ�o��λ�ϵ��(q��)�����O(sh��)�侎̖�������O(sh��)����ԡ�
�����Uչ�YԴӳ�䷽��
EIO24088-V2��EIO16084�Uչģ�K���Ѓ���YԴ��Ҫӳ�䣬�S�YԴ��IO�YԴ��
1��IOӳ��
�������ϳ���ֻ��ͨ�^IO��̖�Ϳ����L�����Uչģ�K�ϵ��YԴ��EtherCAT�����Uչģ�KIO��̖ͨ�^����ָ��NODE_IO���O(sh��)�ã�ͬ�r����ݔ���ݔ����
IOӳ��r�Ȳ鿴���������������IO��̖(�����ⲿIO�ӿں��}�_�S��(n��i)�Ľӿ�)����ʹ��ָ���O(sh��)�á�
���Uչ��IO�c����������IO��̖�غϣ����ߌ�ͬ�r�����ã�����IOӳ���ӳ��ľ�̖����������ϵ�y(t��ng)�о������؏�(f��)��
IOӳ���Z����
NODE_IO(slot,node)=iobase
slot����λ̖��0-ȱʡ
node���O(sh��)�侎̖����̖��0�_ʼ
iobase��ӳ��IO��ʼ��̖���O(sh��)�ýY(ji��)��ֻ����8�ı���(sh��)
ʾ����
NODE_IO(0,0)=32 '�O(sh��)�ò�λ0�ӿ��O(sh��)��0��IO��ʼ��̖��32
���O(sh��)��0��EIO24088-V2���������Z�����ú���ʼ��̖ӳ���32��ԓ�Uչģ�K�ϵ�ݔ�뾎̖���ⲿ�Ԏ���24�c+�S�ӿ�ͨ��ݔ��8�c��һ��32�c������32-63��ݔ����̖���ⲿ��8�c+�S�ӿ�ͨ��ݔ��8�c����16�c������32-47��
2���Sӳ��
�Uչģ�K���Sʹ��ǰ��Ҫʹ��“AXIS_ADDRESS”ָ��ӳ���S̖���Sӳ��Ҳ��Ҫע������ϵ�y(t��ng)���S̖�����؏�(f��)��EIOϵ�ДUչ�S��ӳ���c�����(q��)�������Sӳ���Z����ͬ��
�Sӳ���Z����
AXIS_ADDRESS(�S̖)=(��λ̖<<16)+�(q��)������̖+1
ʾ����
AXIS_ADDRESS(0)=(0<<16)+0+1 'EtherCAT�����ϵĵ�һ���(q��)�������(q��)������̖0���������S0
AXIS_ADDRESS(1)=(0<<16)+1+1 'EtherCAT�����ϵĵڶ����(q��)�������(q��)������̖1���������S1
����һ����(ji��)�c��EIO24088-V2����ô�@����(q��)������̖0����(y��ng)�B����EIO24088-V2�ϵĵ�һ�������D(zhu��n)�}�_���(q��)������
�ġ�������ʼ��
EIO24088-V2�Uչģ�K��Ҫ��(j��ng)�^������ʼ��֮�����ʹ�ã��D�鿂����ʼ�����̡�
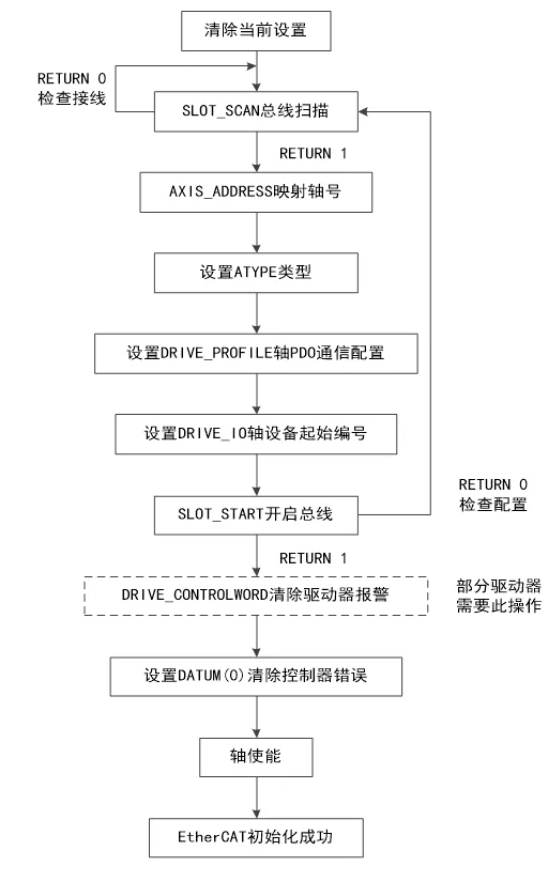
�M�п�����ʼ���ЃɷN��ʽ��
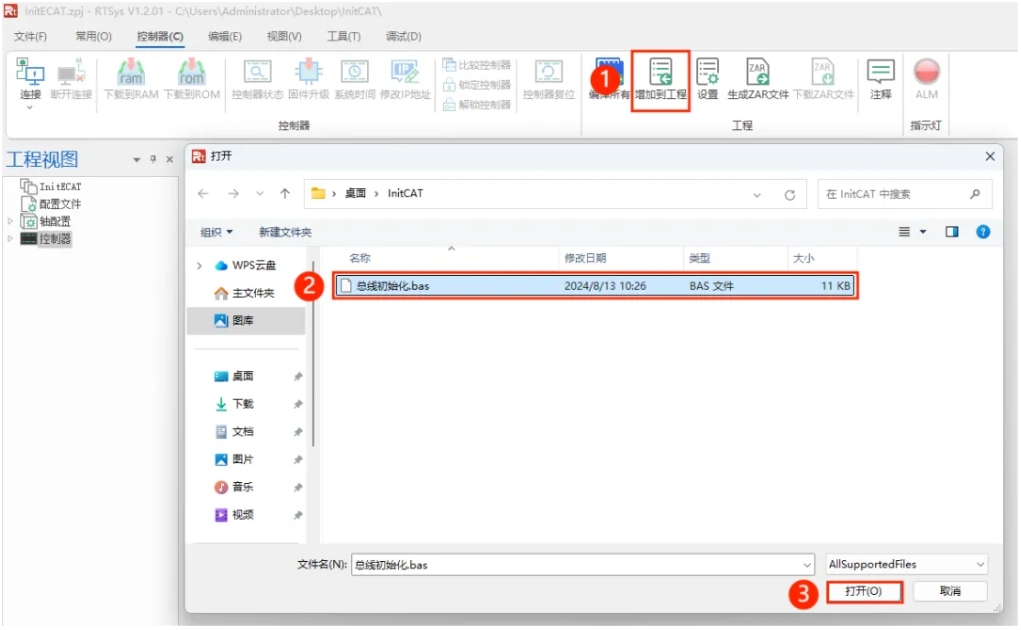
1.ͨ�^���\���ṩ�Ŀ�����ʼ���_���M�г�ʼ��
2.�ҵ�RTSys�Ĺ����O(sh��)�ã����_�����S���ü�EtherCAT������������
�Ƚo��ҽ�B���ǵ�һ�Nͨ�^������ʼ���_���M�п�����ʼ�����˳�ʼ��������Á���ʼ��EtherCAT�(q��)������EtherCAT�����Uչģ�K������ͨӍ�B�ӣ�ͨ��ģ�壬�m���ڶ�NƷ�Ƶ��(q��)���������������\�ӏS���ṩ��
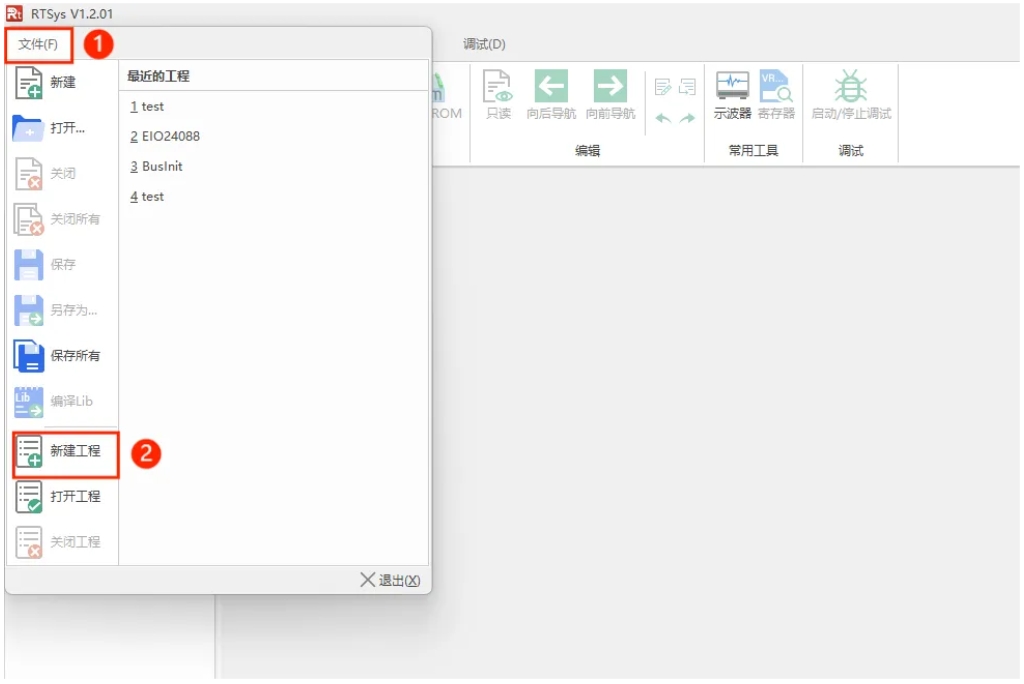
1����RTSys��ZDevelop���½�һ������
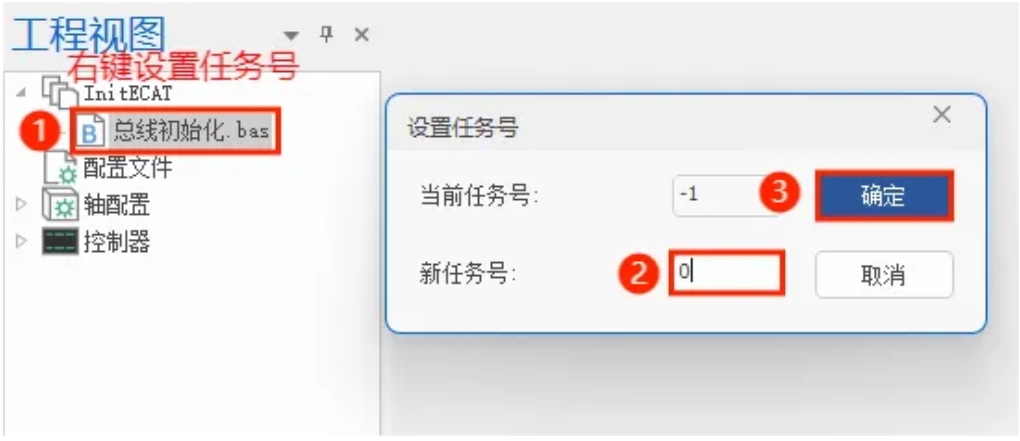
2���ѿ�����ʼ���_������������
3���O(sh��)�ó�ʼ���_�����΄�(w��)̖
4���O(sh��)�ñ����}�_�S��(sh��)����ʼ��̖�������S����ʼ��̖����ʹ�ñ����}�_�Sֻʹ�ÿ����S��ʹ��Ĭ�J���ã��ɸ���(j��)���Hʹ����r�ą���(sh��)������ʾ�rʹ�������������}�_�S��ECAT�����B����һ��EIO24088-V2���ɂ����µ��(q��)������һ���_�_���(q��)������
5��������ʼ��ģ�����
'����������S��(sh��)
TABLE(0)= SYS_ZFEATURE(0)
GLOBAL CONST ControlMaxAxis = TABLE(0)
'֧��늙C����(sh��)
TABLE(0)= SYS_ZFEATURE(1)
GLOBAL CONST RealAxisMax = TABLE(0)
'��λ̖�����ο���������ȱʡ0�����w�鿴Ӳ���փԣ�
GLOBAL CONST Bus_Slot = 0
'�����}�_�S��ʼ��̖
GLOBAL CONST LocalAxis_Start = 11
'�����}�_�S�S��(sh��)��
GLOBAL CONST LocalAxis_Num = 2
'�����S��ʼ��̖
GLOBAL CONST BusAxis_Start = 0
'�����(q��)������ʼIOS
GLOBAL CONST BusStaraIoNum=128
'������ʼ����B(t��i) -1--δ�M�� 0--��ʼ���e�` 1--��ʼ�����
GLOBAL ECAT_InitEnable
ECAT_InitEnable = -1
'���t3�룬�ȴ��(q��)������늣���ͬ�(q��)����������늕r�g��ͬ�����w����(j��)�(q��)�����{(di��o)���ӕr
DELAY(3000)
'? "����ͨӍ���ڣ�",SERVO_PERIOD,"us"
ECAT_Init() '�{(di��o)�ó�ʼ������(sh��)
DIM ScanNum
'����]�В��赽�ڒ���4��
IF ECAT_InitEnable<>1 THEN
FOR ScanNum=0 to 3
ECAT_Init() '�{(di��o)�ó�ʼ������(sh��)
IF ECAT_InitEnable=1 THEN EXIT FOR
NEXT
ENDIF
END
'/*************************************************************
'Description: //�����S��ʼ��
'Input: //
'Input: //
'Input: //
'Output: // ECAT_InitEnable=ON -->��ʼ����ɘ�־
'Return: //
'*************************************************************/
GLOBAL SUB ECAT_Init()
LOCAL NodeSum_Num ,BusAxis_Num ,NodeAxis_Num '�O(sh��)�係��(sh��)�������S����(sh��)��ÿ����(ji��)�c�ϵ�늙C��(sh��)
LOCAL Drive_Vender,Drive_Device,Drive_Alias '�(q��)�ӏS�̾�̖���(q��)���O(sh��)�侎̖���(q��)���O(sh��)��ܴaID
local i,j
? "����ͨӍ���ڣ�",SERVO_PERIOD,"us"
RAPIDSTOP(2)
'��ʼ��߀ԭ�S���
FOR i = 0 TO ControlMaxAxis - 1
AXIS_ADDRESS(i) = 0
AXIS_ENABLE(i) = 0
ATYPE(i) = 0
WAIT IDLE(i)
NEXT
'�����S����ӳ��
FOR i=0 TO LocalAxis_Num -1
AXIS_ADDRESS(LocalAxis_Start+i)= (-1<<16) + i '�������S0-->iӳ�䵽�S20-->20+i
ATYPE(LocalAxis_Start+i)=0 '�S���
NEXT
ECAT_InitEnable = -1
SYSTEM_ZSET = SYSTEM_ZSET OR 128
'���迂���(q��)����
FOR i=0 to 3
SLOT_STOP(Bus_Slot)
DELAY(200)
SLOT_SCAN(Bus_Slot)
IF NODE_COUNT(Bus_Slot) THEN EXIT FOR
DELAY(1000)
NEXT
IF RETURN THEN
NodeSum_Num = NODE_COUNT(Bus_Slot)
? "��������ɹ����B���O(sh��)�䔵(sh��)��",NodeSum_Num
'�����S����(sh��)����0�_ʼӋ��(sh��)
BusAxis_Num = 0
FOR i = 0 TO NodeSum_Num - 1
NodeAxis_Num = NODE_AXIS_COUNT(Bus_Slot,i) '�xȡ�O(sh��)��늙C��(sh��)
Drive_Vender = NODE_INFO(Bus_Slot,i,0) '�xȡ�(q��)�����S��
Drive_Device = NODE_INFO(Bus_Slot,i,1) '�xȡ�O(sh��)�侎̖
Drive_Alias = NODE_INFO(Bus_Slot,i,3) '�xȡ�O(sh��)��ܴaID
'�S�O(sh��)��
FOR j = 0 TO NodeAxis_Num - 1
AXIS_ADDRESS(BusAxis_Num+BusAxis_Start) = BusAxis_Num + 1 'ӳ���S̖
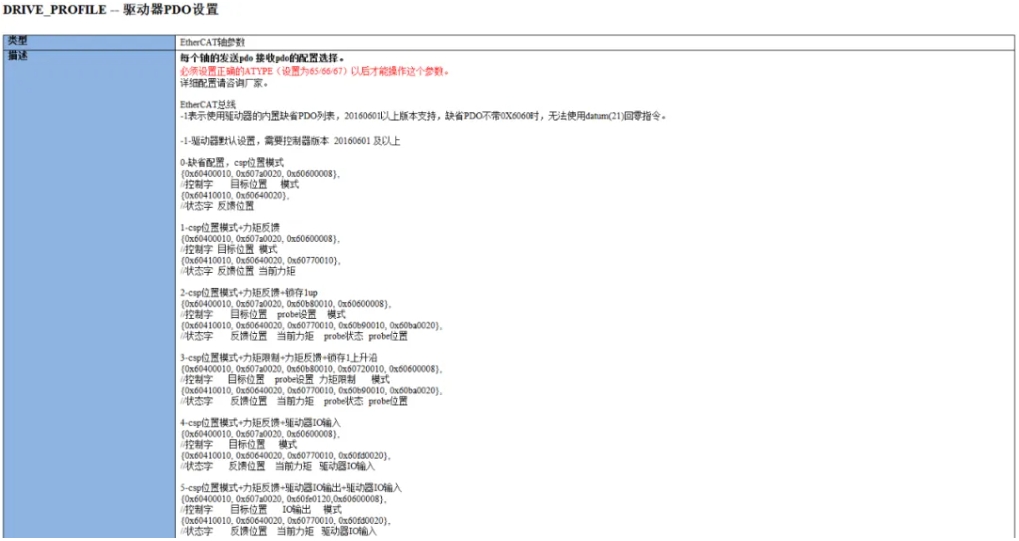
ATYPE(BusAxis_Num+BusAxis_Start) = 65 '�O(sh��)�ÿ���ģʽ 65-λ�� 66-�ٶ� 67-�D(zhu��n)�� Ԕ������AXISSTATUS
DRIVE_PROFILE(BusAxis_Num+BusAxis_Start) = 0 '�(q��)����PDO�O(sh��)��,�(q��)����Ĭ�J�O(sh��)��-- -1 λ��ģʽ--0 �ٶ�ģʽ--20+ ����ģʽ--30+
DISABLE_GROUP(BusAxis_Num+BusAxis_Start) 'ÿ�S�Ϊ��ֽM
IF DRIVE_PROFILE(BusAxis_Num+BusAxis_Start)=4 OR DRIVE_PROFILE(BusAxis_Num+BusAxis_Start)=5 THEN
'�O(sh��)�ÿ����(q��)��������ʼIO��ַ
DRIVE_IO (BusAxis_Num+BusAxis_Start) = BusStaraIoNum+8*(BusAxis_Num+BusAxis_Start)
'�O(sh��)��ؓ��λ
REV_IN(BusAxis_Num+BusAxis_Start) = DRIVE_IO (BusAxis_Num+BusAxis_Start)
INVERT_IN(DRIVE_IO (BusAxis_Num+BusAxis_Start),ON)
'�O(sh��)������λ
FWD_IN(BusAxis_Num+BusAxis_Start) = DRIVE_IO (BusAxis_Num+BusAxis_Start)+1
INVERT_IN(DRIVE_IO (BusAxis_Num+BusAxis_Start)+1,ON)
'�O(sh��)��ԭ�c
DATUM_IN(BusAxis_Num+BusAxis_Start) = DRIVE_IO (BusAxis_Num+BusAxis_Start)+2
INVERT_IN(DRIVE_IO (BusAxis_Num+BusAxis_Start)+2,ON)
ELSEIF DRIVE_PROFILE(BusAxis_Num+BusAxis_Start)<4 THEN
IF REV_IN(BusAxis_Num+BusAxis_Start)>=BusStaraIoNum THEN
'ȡ���O(sh��)��ؓ��λ
REV_IN(BusAxis_Num+BusAxis_Start) = -1
ENDIF
IF FWD_IN(BusAxis_Num+BusAxis_Start)>=BusStaraIoNum THEN
'ȡ���O(sh��)������λ
FWD_IN(BusAxis_Num+BusAxis_Start) = -1
ENDIF
IF DATUM_IN(BusAxis_Num+BusAxis_Start)>=BusStaraIoNum THEN
'ȡ���O(sh��)��ԭ�c
DATUM_IN(BusAxis_Num+BusAxis_Start) = -1
ENDIF
ENDIF
BusAxis_Num = BusAxis_Num + 1 '�����SӋ��(sh��)+1
NEXT
'���\��EIO24088-V2�����D(zhu��n)�}�_�Uչ�S
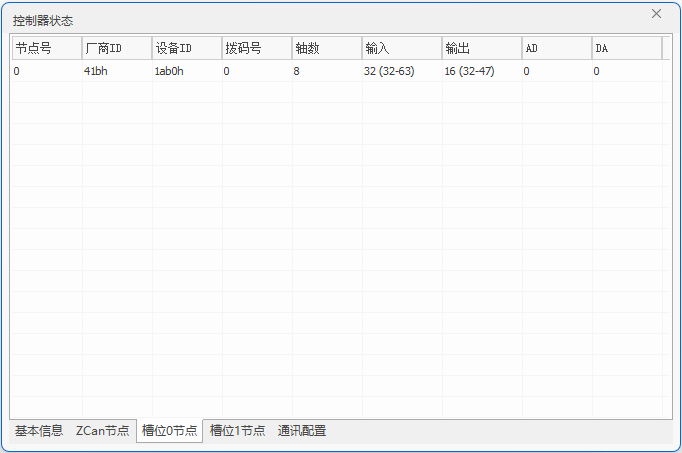
IF Drive_Vender = $41B AND Drive_Device = $1ab0 THEN
local k
for k=0 to 7
SDO_WRITE(Bus_Slot,i,$6011+k*$800,0,5,7) '�O(sh��)�ÔUչ�}�_�SATYPE���
SDO_WRITE(Bus_Slot,i,$6012+k*$800,0,6,0) '�O(sh��)�ÔUչ�}�_�SINVERT_STEP�}�_ݔ��ģʽ
NODE_IO(Bus_Slot,i) = 32 + 32*i '�O(sh��)��24088��IO����ʼӳ���ַ
next
ENDIF
NEXT
? "�S����ӳ����ɣ��B�ӿ����S��(sh��)��",BusAxis_Num
DELAY(100)
SLOT_START(Bus_Slot)
WA(3000) ' ���t3�룬�ȴ��(q��)�����r�ͬ������ͬ�(q��)�����r�g��ͬ�����w����(j��)�(q��)�����{(di��o)���ӕr
IF RETURN THEN
? "�_ʼ����(q��)������"
FOR i = BusAxis_Start TO BusAxis_Start + BusAxis_Num - 1
BASE(i)
DRIVE_CLEAR(0)
WA(10)
DRIVE_CONTROLWORD(i) = 128 ' �ŷ��e�`���
WA(10)
DRIVE_CONTROLWORD(i)=6 ' �ŷ�shutdown
WA(10)
'DRIVE_CONTROLWORD(i)=7 ' �ŷ�disable voltage
'WA(10)
DRIVE_CONTROLWORD(i)=15 ' �ŷ�fault reset
WA(10)
NEXT
DELAY(100)
? "��������������"
DATUM(0) ' ��������S���e�`��B(t��i)��
DELAY(1000)
?"�_ʼ�ŷ�ʹ��"
WDOG = 1
FOR i = BusAxis_Start TO BusAxis_Start + BusAxis_Num - 1
AXIS_ENABLE(i) = 1
NEXT
?"�ŷ�ʹ�����"
ECAT_InitEnable = 1
ELSE
?"�����_��ʧ��"
ECAT_InitEnable = 0
ENDIF
ELSE
?"��������ʧ��"
ECAT_InitEnable = 0
ENDIF
ENDSUB
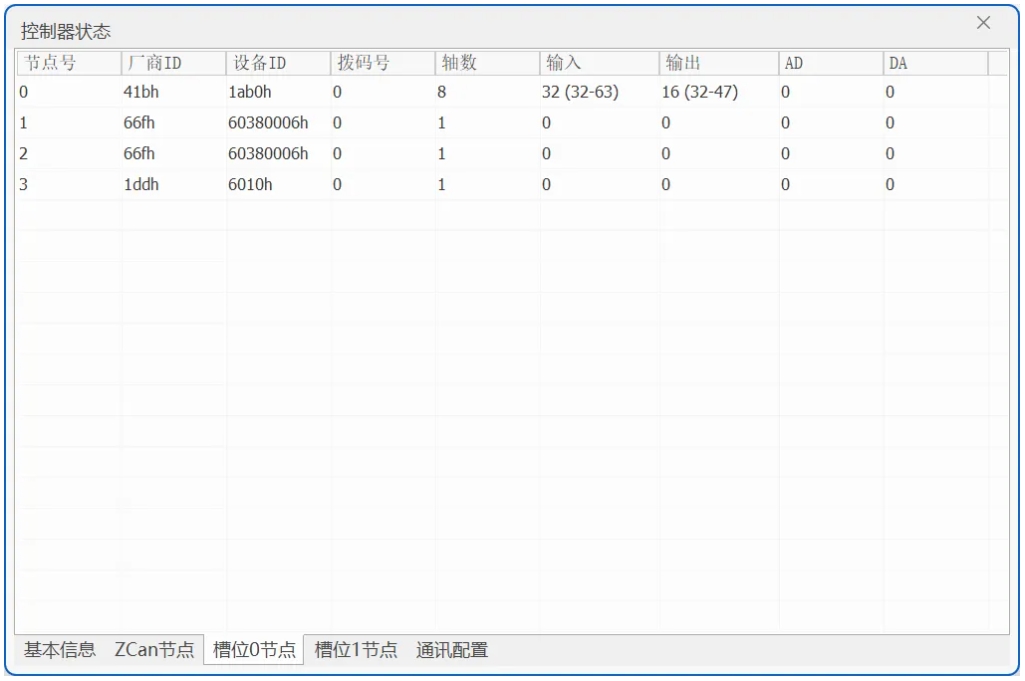
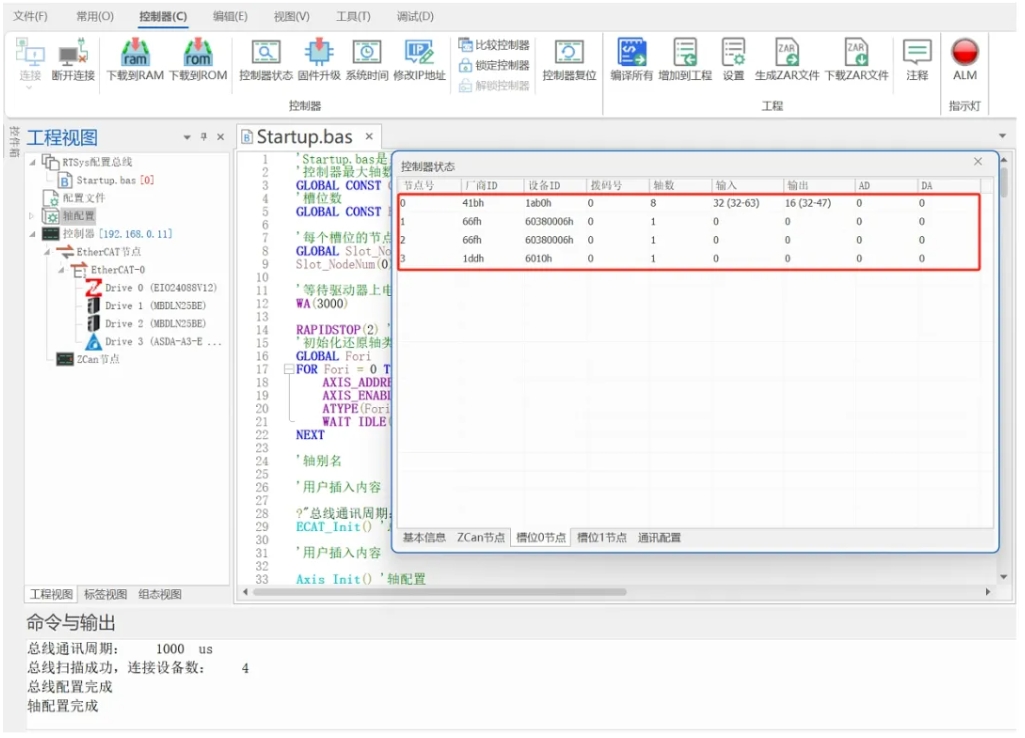
�������ò��ÿ����������B��һ��EIO24088-V2�Uչģ�K�̓ɂ����¼�һ���_�_��EtherCAT�����(q��)�������������ϳ�ʼ�����ɹ�����ͨӍ�B�ӣ���������B(t��i)�����@ʾ��ǰ�����B�ӵĹ�(ji��)�c��r��
�����ϵ���վ����������������B�ӵĵ�һ����վ�O(sh��)���EIO24088-V2�Uչģ�K���ڶ������������͵��Ă���վ�O(sh��)���EtherCAT�����(q��)��������ʹ�ÿ������ı����}�_�S�ӿڡ������ϵ��(q��)���O(sh��)��ӳ���S̖��0�_ʼ��EIO24088-V2�Uչģ�K��AXIS 0-7�ӿ��ϵ��}�_�(q��)����ӳ����S̖0-7������EtherCAT�����(q��)����ӳ����S̖8-10�������S��11�_ʼ��EIO24088-V2�Uչģ�K��IO��̖��ʼ��32��
ע�⣺ӳ����S̖��IO��̖��������ϵ�y(t��ng)�в����؏�(f��)������(j��)���w��rȥ�x��̖��
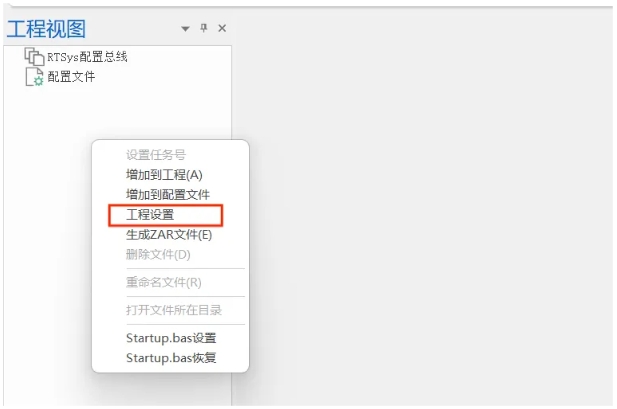
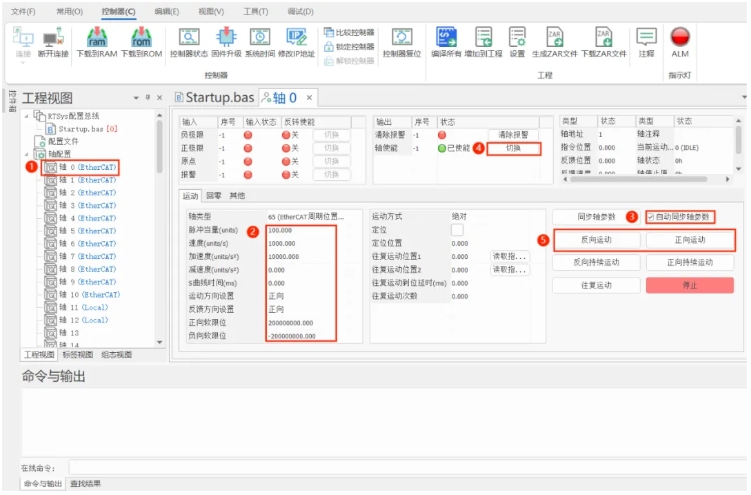
�����o��ҽ�B�ڶ��N������ʼ�����õķ�����ͨ�^RTSys�Ĺ����O(sh��)���������ÿ�����ʼ���_����
1����RTSys���½�һ������

2�����_EtherCAT���á��ڹ���ҕ�D���I�x���O(sh��)�ã����x�S���ü�EtherCAT����
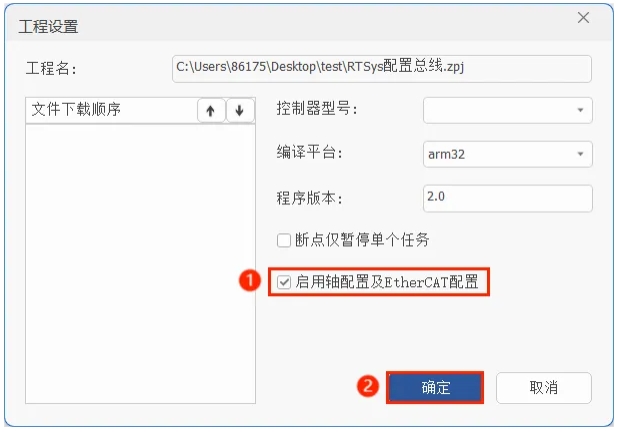
3�������Ҫ���õĿ�����(ji��)�c

4�����������S̖�����
��1���p�����������_���������ý��棻
��2���x����Ҫʹ�õı����}�_�S��(sh��)������ʾ�x��ɂ������}�_�S����
��3���o�����}�_�S��ӳ���S̖��
��4���x���}�_�S���S��ͣ�����(j��)ʹ����r�����x��
��5����EtherCAT���赽�Ŀ����S�M���S̖ӳ�䣻
��6���O(sh��)���S��ͣ�
��7������(j��)ʹ����r�x��65/66/67����ͬ�S��������PDO�б���ͬ����
��8���c����(y��ng)���Ԅ�����Startup.bas���������ļ���
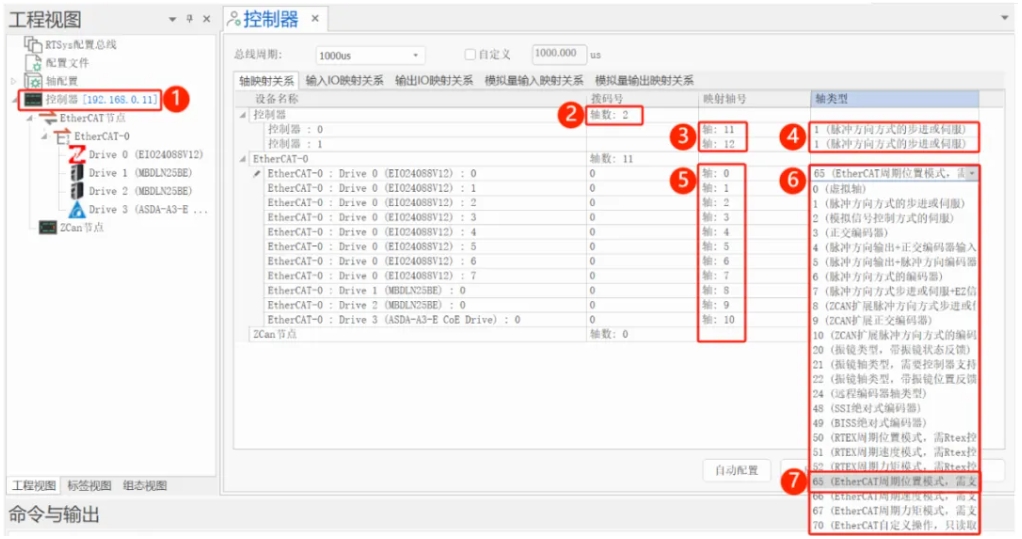
����ʾ�����˃ɂ������}�_�S���S̖��ӳ���11��12����EIO24088-V2�İ˂������D(zhu��n)�}�_�S���S̖ӳ���0-7�����ɂ����¿����ŷ��(q��)������һ���߄�(chu��ng)�����ŷ��(q��)�������S̖ӳ���8-10����
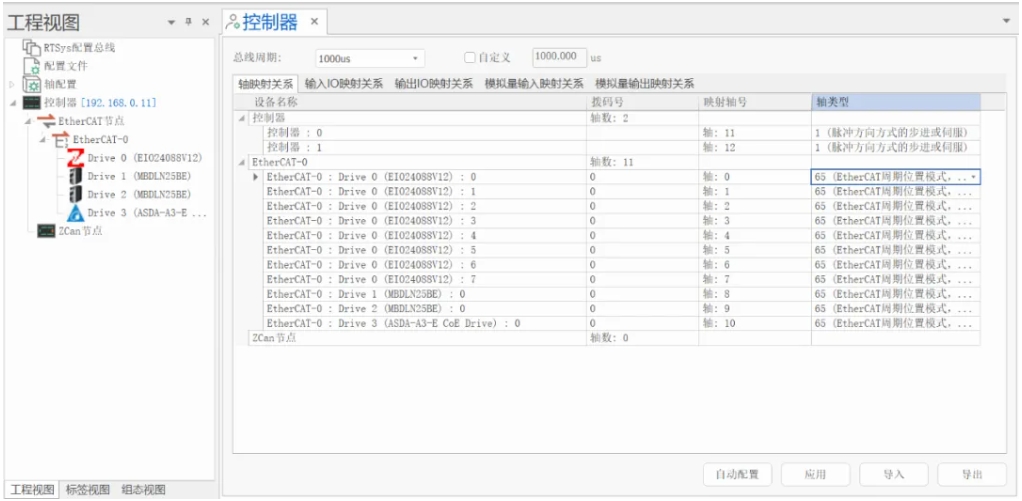
5���M��PDO�O(sh��)�����(j��)�����x��
��1���x����Ҫ���õĹ�(ji��)�c������ʾ���x��EIO24088-V2����
��2���x����Ҫ���õ��S���˂��S����Ҫ���ã���
��3���M��PDO�O(sh��)�ã��x��0���ɣ���
��4�������S����������c����(y��ng)�ñ������á�



�ڎ����ęn�пɲ�ԃ��PDO�O(sh��)�õĔ�(sh��)��(j��)�ֵ�Ԕ�飬����(j��)���������x��
6�������úõ�Startup.bas���d�M�������M�п�����ʼ��
�塢ͨ�^RTSys�yԇ�Uչ���YԴ
1���yԇIO�YԴ
�ڛ]��IO�O(sh��)�����r�£��҂�����ͨ�^OUT��IN�˿�ֱ�����B�Д�IO��푑�(y��ng)��r�����D���yԇEIO�Uչģ�K��IO���ã���EIO��OUT2(ӳ�侎̖34)�����B�ӵ�EIO24088-V2��IN8��ӳ�侎̖40���ϣ�����OP(34)��Ҋݔ���40�յ���̖��
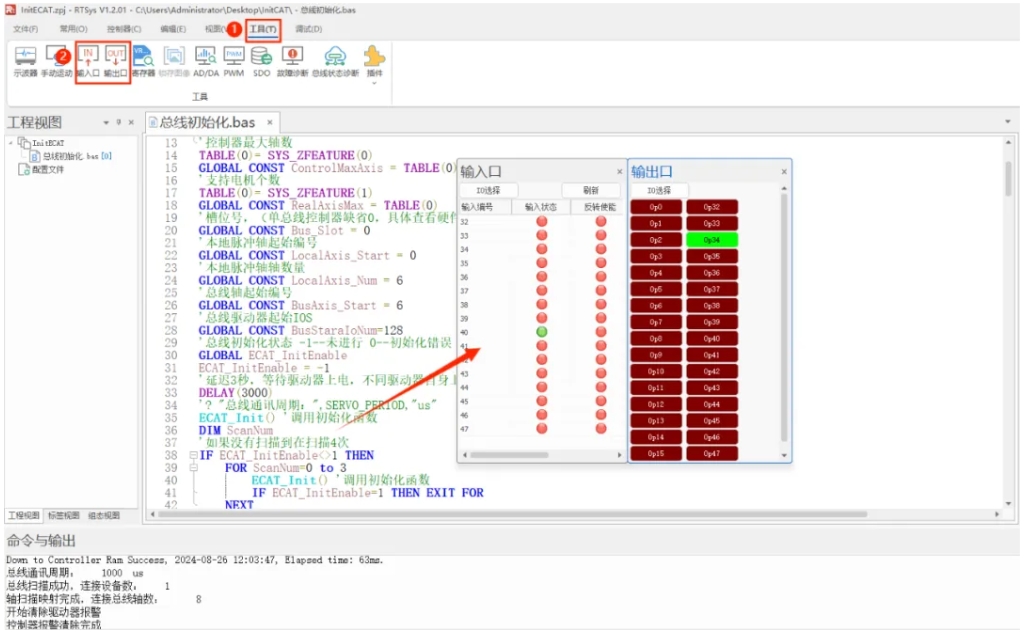
�yԇIO�YԴҲ��ͨ�^���_�����O(sh��)�õ�EtherCAT���Üyԇ�����Uչģ�K��IO�YԴ��
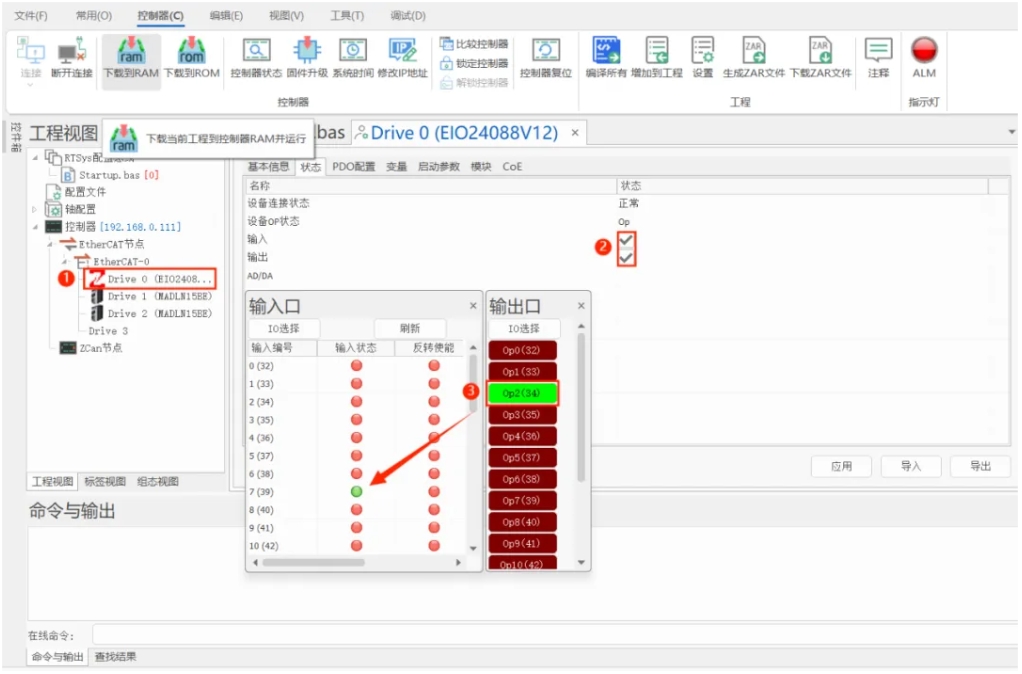
��1�����_EIO24088-V2�Ľ��棻
��2�����_EIO24088-V2��ݔ��ݔ���ڣ�
��3���������UչEIO24088-V2�ϵ�OUT2��IN7���B����OUT2���_��IN7Ҳ����1�f��IO������
2���yԇ�}�_�S
���Ȍ���Ҫ�yԇ���}�_�S�M��ӳ�䣨��ʼ������ӳ�䲻��Ҫ������yԇEIO24088-V2���S1��
AXIS_ADDRESS(7)=(0<<16)+1+1 'EtherCAT�����ϵĵڶ����(q��)�������(q��)������̖1���������S7
�Uչģ�K��DRIVE_PROFILE���Þ�0��ATYPE�O(sh��)��65�������ڔUչ�ǿ����D(zhu��n)�}�_���(q��)�������S��Ͳ�����65���挍�S��͵�����ʹ��SDOָ�����Ô�(sh��)��(j��)�ֵ�6011h�O(sh��)�á�
SDOָ�������(q��)��������(sh��)��
���磺�Uչ���}�_�S���挍�S����O(sh��)��ͨ�^��(sh��)��(j��)�ֵ�6011h�O(sh��)�ã��������±��ą���(sh��)�����S̖�����O(sh��)�ã���һ���(q��)�����O(sh��)�Ô�(sh��)��(j��)�ֵ�6011h+0*800h���ڶ����(q��)�����O(sh��)��6011h+1*800h���Դ���ƣ�ÿ���(q��)������800h����������(sh��)ͬ������
��1��ݔ��ݔ����

��2����һ���Uչģ�K�ϵ�һ���(q��)������

��(sh��)��(j��)�ֵ��xȡ�Z����
SDO_READ (��λ̖, �O(sh��)�侎̖, ��(sh��)��(j��)�ֵ侎̖, ��(sh��)��(j��)�ֵ��Ӿ�̖, ��(sh��)��(j��)���, �xȡ��(sh��)��(j��)�惦TABLEλ��)
SDO_READ_AXIS (�S̖, ��(sh��)��(j��)�ֵ侎̖, ��(sh��)��(j��)�ֵ��Ӿ�̖, ��(sh��)��(j��)���, �xȡ��(sh��)��(j��)�惦TABLEλ��)
��(sh��)��(j��)�ֵ䌑���Z����
SDO_WRITE (��λ̖, �O(sh��)�侎̖, ��(sh��)��(j��)�ֵ侎̖, ��(sh��)��(j��)�ֵ��Ӿ�̖, ��(sh��)��(j��)���, ���딵(sh��)��(j��)ֵ)
SDO_WRITE_AXIS (�S̖, ��(sh��)��(j��)�ֵ侎̖, ��(sh��)��(j��)�ֵ��Ӿ�̖, ��(sh��)��(j��)���, ���딵(sh��)��(j��)ֵ)
��(sh��)��(j��)�ֵ��x��ʾ����
�x��̎�ڹ�(ji��)�c0��EIO24088-V2���S1���S��͡�
SDO_WRITE(0, 0, $6011 + 1 * $800, 0, 5, 7) '�O(sh��)��EIO24088-V2���S1���S��͞�7
SDO_READ(0, 0, $6011 + 1 * $800, 0, 5, -1) '���S1���S��͔�(sh��)��(j��)��ӡ����

�_�J���S��͡��}�_ģʽ���yԇ�r�Ȍ�UNITS���}�_��������SPEED���\���ٶȣ���ACCEL�����ٶȣ���DECEL���p�ٶȣ��O(sh��)��СһЩ���C��ȫ�����O(sh��)�Þ��Ԅ�ʹ�ܣ�ͨ�^6013H��BIT8�O(sh��)�ã��z���Sʹ�ܣ�AXIS_ENABLE���Ƿ���1���ք�ʹ�܄t���Sʹ�ܣ�AXIS_ENABLE��������(y��ng)�Sʹ��ݔ������1��
�l(f��)���\��ָ�늙C�Ƿ������\�ӣ���DPOS��MPOS�Ƿ�׃���������m(x��)�ٸ���(j��)�(q��)�����Ƅ�1mm���D(zhu��n)��һȦ���}�_��(sh��)����UNITS���˕rMOVE(1)�����Ƅ�1mm���D(zhu��n)��һȦ��SPEED�Ć�λ��mm/s��r/s��

ע�⣺
����ք��\�ӕr�S���Ƅӵ�DPOS��ָ��λ�ã��cMPOS�����a������λ�ã���׃���f���S���Ƅӵ��ƄӾ��x̫�����ۿ������������m������UNITS�����Ƅӡ�
������F(xi��n)�ք��\�ӕr�Sֻ����һ�������Ƅӄt��z���(q��)�������S��ͼ��}�_ģʽ��ͨ�^�(q��)�����փԻ���ܛ��֪�ԣ���6011H��6012H���O(sh��)�õ��S��ͺ��}�_ģʽ�Ƿ�ƥ�䣬�z��Ӿ��Ƿ��Ʉӡ�
Ҳ��ͨ�^���_�����O(sh��)���е��S���ü�EtherCAT���Üyԇ�����Uչģ�K�Ŀ����D(zhu��n)�}�_�S��
��1���x����Ҫ�yԇ���S��
��2���O(sh��)�ú��m���S����(sh��)��
��3���Ԅ�ͬ���S����(sh��)��
��4�����_�Sʹ�ܣ�
��5��ͨ�^�����\�ӻ����\���M���c�Ӝyԇ�S�Ƿ�������
�̌W(xu��)ҕ�l���c��→8�S/4�S��EtherCAT�Sģ�KEIO24088-V2��EIO16084��ʹ�ã�һ����RTSys���������cʹ���鿴��
���Σ����\�Ӽ��g(sh��)8�S/4�S��EtherCAT�Sģ�KEIO24088-V2��EIO16084��ʹ�ã�һ����RTSys���������cʹ�ã��ͷ������@�
���ྫ�ʃ�(n��i)��Ո�P(gu��n)ע“���\��С����”����̖����Ҫ���P(gu��n)�_�l(f��)�h(hu��n)���c���̴��a��Ո��ԃ���\�Ӽ��g(sh��)�N�۹��̎���400-089-8936��
���������\�Ӽ��g(sh��)ԭ��(chu��ng)���gӭ����D(zhu��n)�d����ͬ�W(xu��)��(x��)��һ������Ї���������ˮƽ�����°��(qu��n)�w���\�Ӽ��g(sh��)���У������D(zhu��n)�dՈע������Դ��
���\�Ӽ��g(sh��)��ע���\�ӿ��Ƽ��g(sh��)�о���ͨ���\�ӿ���ܛӲ���a(ch��n)Ʒ���аl(f��)���LJ��Ҽ����¼��g(sh��)��I(y��)�����\�Ӽ��g(sh��)�R���ˁ����A�顢���d�ȹ�˾�ă�(y��u)���˲ţ��ڈԳ�������(chu��ng)�µ�ͬ�r���e�O(li��n)�ϸ����У�f(xi��)ͬ�\�ӿ��ƻ��A(ch��)���g(sh��)���о����LJ���(n��i)�����I(l��ng)��l(f��)չ������I(y��)֮һ��Ҳ�LJ���(n��i)���С����������\�ӿ��ƺ��ļ��g(sh��)�͌��r����ܛ��ƽ�_���g(sh��)����I(y��)����Ҫ�I(y��)��(w��)�У��\�ӿ��ƿ�_�\�ӿ�����_EtherCAT�\�ӿ��ƿ�_EtherCAT������_�\�ӿ���ϵ�y(t��ng)_ҕ�X������__�\�ӿ���PLC_�\�ӿ���_�C���˿�����_ҕ�X��λ_XPCIe/XPCIϵ���\�ӿ��ƿ��ȵȡ�
|

