|
�}�_������ԇ�\�пɽ���ZDevelopܛ��������C����Ҫ���������Ă����֣�Ӳ���Ӿ���ZDevelop�B�ӿ������������S����(sh��)���l(f��)���\������鿴늙C�Ƿ��D�ӡ����o���\�Ѕ�Ҋ���}�Ų鲿�ֽ�Q��
һ��Ӳ���Ӿ�
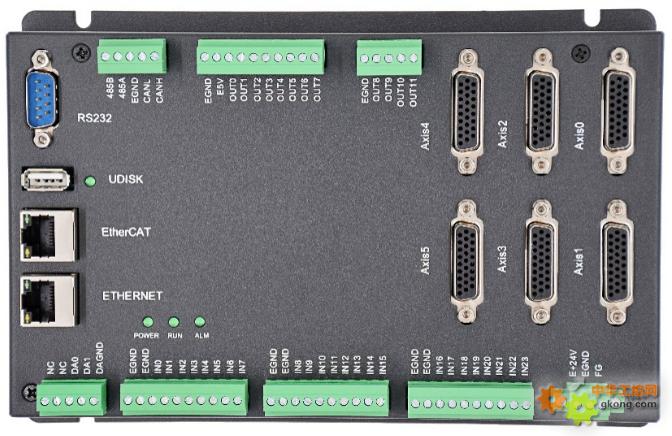
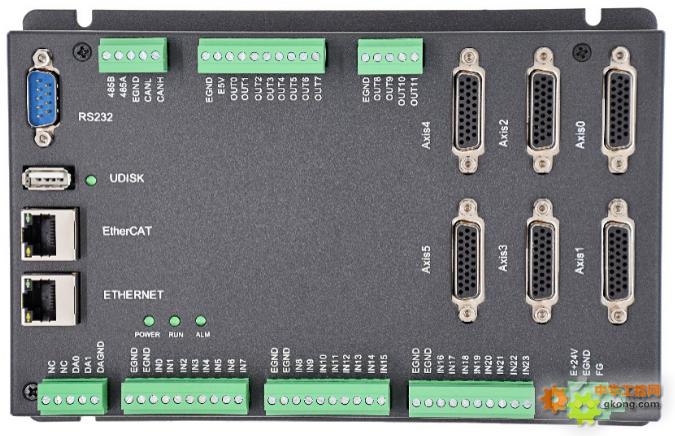
��ZMC432�����\�ӿ�����������֧��EtherCAT��EtherNET��RS232��RS485��CAN��U�P��ͨӍ�ӿڣ��^��������ϵ�Ӳ���ӿڣ������������ܘ����D��
��ͨ�^EtherNET�W(w��ng)�ڻ�RS232�����B�ӵ�ZDevelopܛ�����ԇ�\�С�

1.�}�_�ӿ�
���\�Ӽ��g�ֿ��������}�_���ƽӿڞ�������ṩ��DB26ĸ�^�Ķ��ӣ������DZMC432��AXIS���ӣ����d6���}�_�S�Ľӿڡ�
AIXS���Ӄ���Ҫ�����}�_ݔ���ĽӾ����ӣ����a�������ĽӾ����ӣ�������ʹ�͈ܺ���̖��5V�Դݔ�������ˣ����±���ʾ��

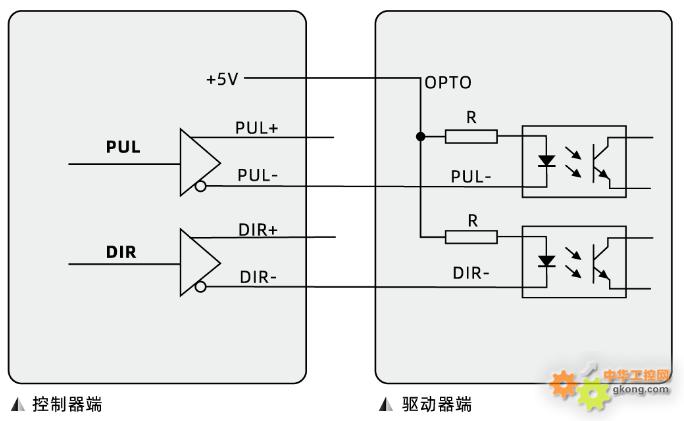
�����D��ɿ������c�������}�_���ƽӾ��������˲�ֽӷ����}�_ݔ�������Ă�����PUL+��PUL-��DIR+��DIR-���քe�c����һһ�����B�Ӽ��ɡ�
�����a�����������O�䣬��ֽӾ���ʽ�nj�EA+��EA-��EB+��EB-��EZ+��EZ-�քe�B�Ӿ��a����
�ٌ���_3����������ʹ�ܶ����ϣ����ڿ������o������ʹ����̖�� �����ψD��
AXIS 0 �S�ӿڶ��Ӄȵ�ʹ����̖��OUT12��
AXIS 1 �S�ӿڶ��Ӄȵ�ʹ����̖��OUT13��
������ơ�
ʹ�ܲ�����OP(12,ON)��OP(13,ON)�ȡ�
��������̖ͨ�^��_2����������� �����ψD��
AXIS 0 �S�ӿڶ��ӃȵĈ���̖��IN24��
AXIS 1 �S�ӿڶ��ӃȵĈ���̖��IN25��
������ơ�
������ݔ����̖��Ҫʹ��ALM_INָ�����ã�ALM_IN(0)=24��ALM_IN(1)=25�ȡ�
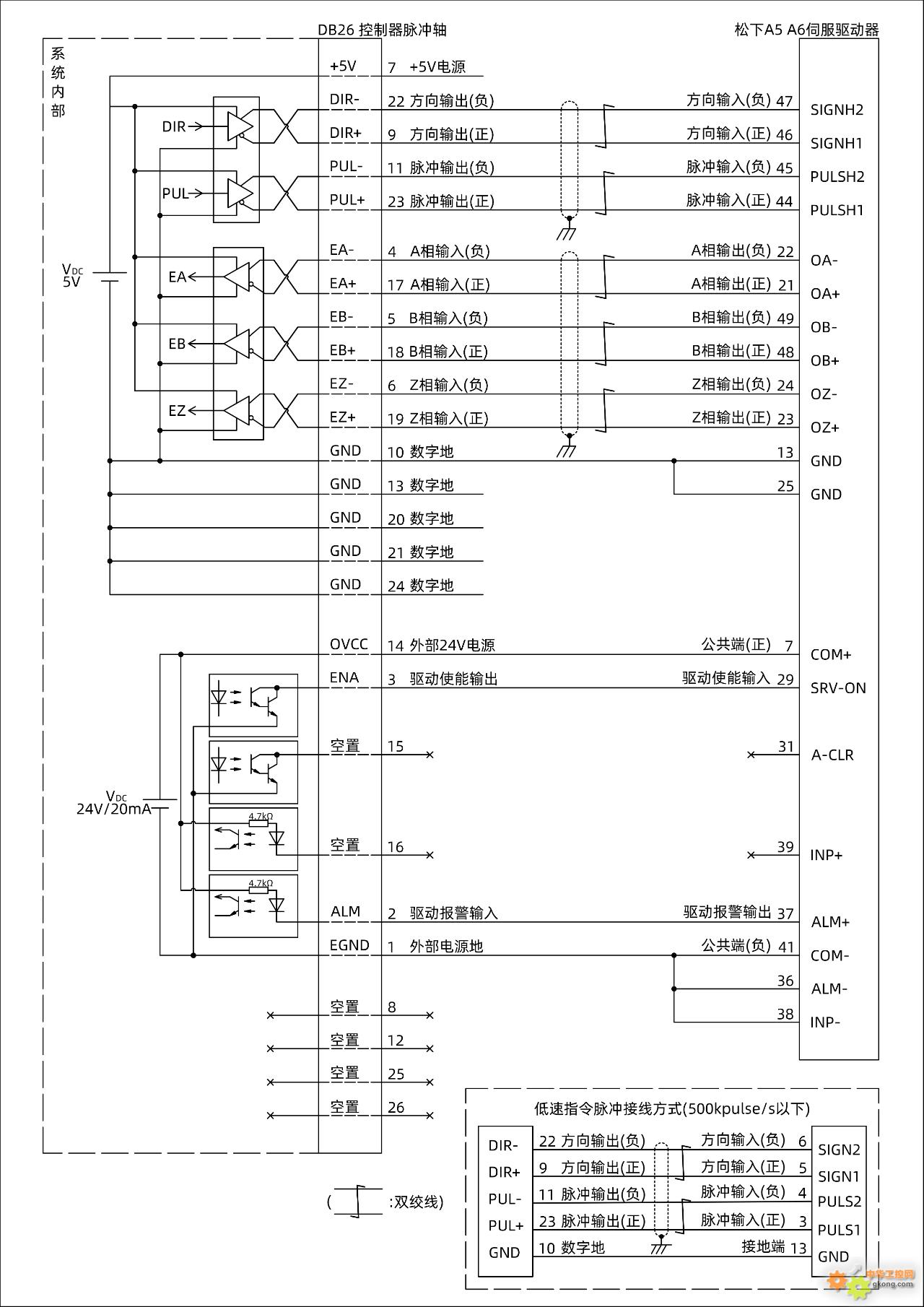
�}�_�Ćζ��B�ӷ�ʽ���D���D���ù�ꖘO�Ľӷ����������Ĺ����˽���DB26�ṩ��+5V�����ϡ�
���a���Ćζ˽Ӿ��D���£����a����A��B���oZ��̖����ֻ̖��AB���ࣩ�c������������EA+��EB+һһ�����B�ӣ���������ؓ���ӑҿգ����a����0V��ؾ����ӣ��B�ӿ������S�ӿڃȵ�GND���Ӽ��ɣ��ٰ����a���Ĺ��Ҫ������Դ��
2.IO�ӿ�
���D��ZMC432֧��6·�}�_�S���ƣ�IO�ڷ���ͨIO�ں���IO�ڣ���ͨIO�ڵ�푑��l�ʞ�10KHz������IO�ڵ�푑��l�ʞ�500KHz��ZMC432�ĸ���IO�ڳ���푑�����֮�⣬����߀����������ܣ���Ҋ�����f����
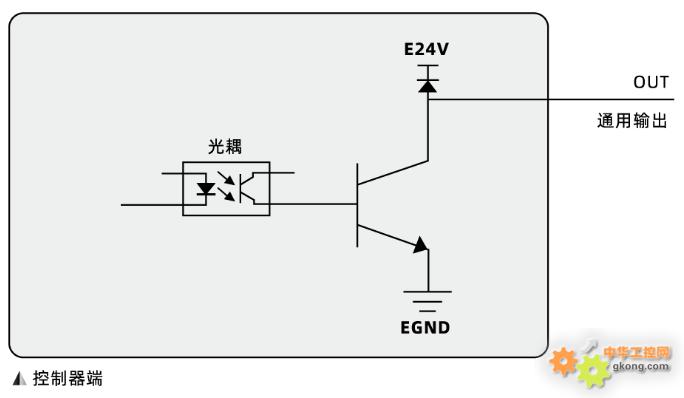
��1��ݔ����
ݔ���ڃȲ��·���D��ݔ����0-1֧��PWM�}�_�����{��ݔ����ͬ�r߀֧�ָ���Ӳ�����^ݔ����PSO���ܣ���
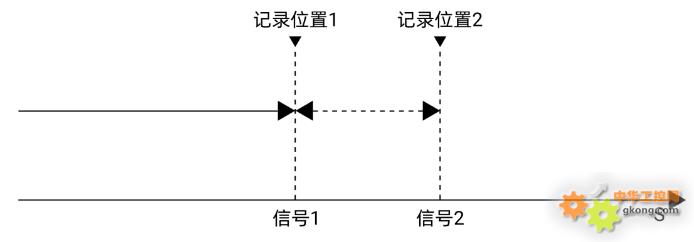
PSO���ܣ�PSO��positionsynchronizedoutput����λ��ͬ��ݔ�������|��ͨ�^�ɼ����r�ľ��a������λ�ã��o���a����ʹ��ݔ�����}�_λ�ã��c���^ģʽ�O����λ���M�б��^������OP����ͬ��ݔ����̖��PSOʾ��D���¡�
PSOһ���c�����������c�z�����y���O�䣩ͬ��ݔ����̖�M����λͬ�������\��܉�E�������A���Ժ㶨�Ŀ��g����㶨�r�g���g���|�l(f��)ݔ���_�P���������١��p�ٺ̈́��ٶΣ��Ķ����F(xi��n)�}�_��������������ڱ��ӹ����w�ϡ�
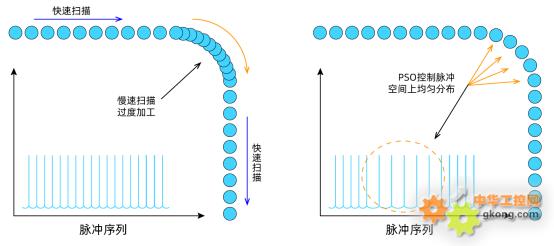
PSO���ܵ����c�����ܸ����ҷ�(w��n)����ݔ����̖�����ݔ���������ߣ������܉��������\��܉�E���Թ̶��ľ��x�|�l(f��)ݔ����̖�����ÿ��]���w�ٶȣ�����ֱ�������Ժܿ���ٶ��\�ӣ����ڈA�Dz��֜p�ٵ�ͬ�rҲ�ܱ��Cݔ���g��㶨��
ͨ���A�Ǽӹ������������ӹ��^����ռ�б��^С�IJ��֣��@���ڱ��C�ӹ�Ч����ͬ�r���Ϳ�������ȵ���߮a(ch��n)�ܡ�
PSO������HW_PSWITCH2ָ��F(xi��n)����ָ���ж�Nģʽ��֧�ֵȾ�ݔ�����̶�����ݔ�����Զ��xλ��ݔ���ȣ����ȸߣ�푑��죬���w���÷�����Ҋ�vʷ������
PWM���ܣ���֧��PWM��OUT�_��PWM���ܣ����O��PWM���l�ʺ�ռ�ձȣ������c�z�y�����ٿ��ơ��������Ĺ��ʿ��ƵȈ��ϡ�
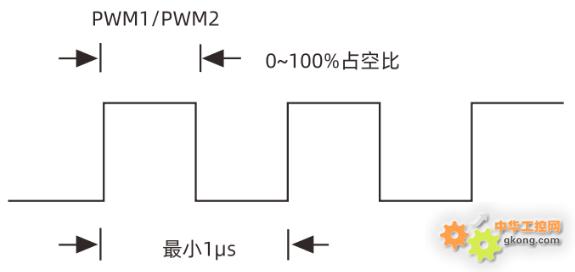
��2��ݔ���
ݔ��ڃȲ��·���D��ݔ���IN0-1֧���i�湦�ܡ�

�i�棺ͨ�^������ݔ����̖��ݔ��ڿ���푑����i�澎�a����ǰ��λ����Ϣ��֧�ֆδ��i����B�m(x��)�i�档
����ZDevelop�B�ӿ�����
�������\�ӵ�ZDevelop�_�l(f��)ܛ���ɿ�������O���ԇ�\�У�������һ��ʹ�þW(w��ng)���B�ӵ�ZDevelop���x��IP��ַ�B�ӣ�Ĭ�J���SIP��192.168.0.11��ע����������cPC̎��ͬһ�W(w��ng)�Ρ�
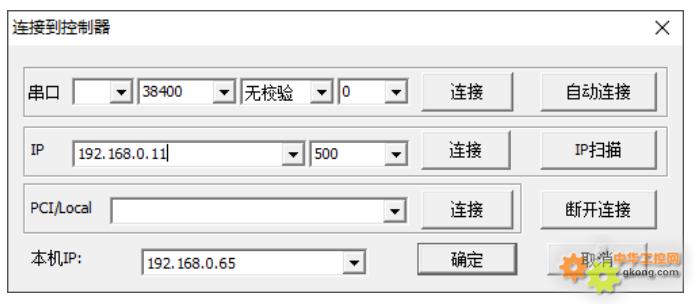
Ҳ����ʹ�ô����B�ӿ�����������Ĭ�J����(sh��)������38400����(sh��)��(j��)λ8���oУ��늺�֏�Ĭ�J����(sh��)��
���������}�_�S����(sh��)
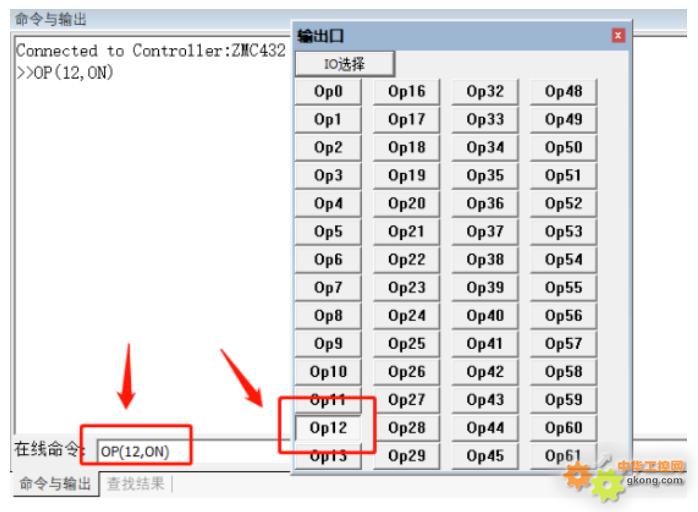
�B�ӿ�����֮����ʹ������������(j��)Ӳ���փ��������S�ӿڃȵ�ʹ����̖OUT��̖���l(f��)��OP��ionum,ON�����_ʹ�ܣ�����ZMC432�l(f��)��OP��12,ON��ʹ��AXIS 0�ϵ�������
�ھ�����l(f��)�ͻ�ҕ�D“ݔ����”����OP����늼�ʹ�ܵIJ��M�ӟo��˲�����
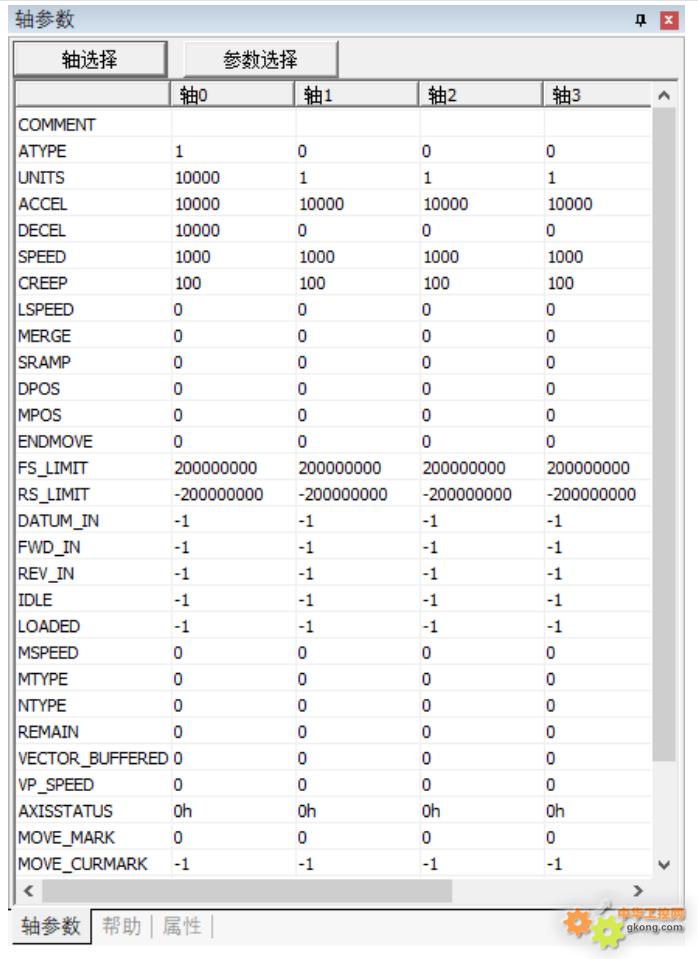
�����S����(sh��)����“ҕ�D”-“�ք��\��”��“�S����(sh��)”���ڿ������ã����½����̌���ָ���Z�����d����������
1.BASE
BASE�x���}�_�S������S̖������DB�^���S��̖��������Ϙ��R��AXIS��̖��
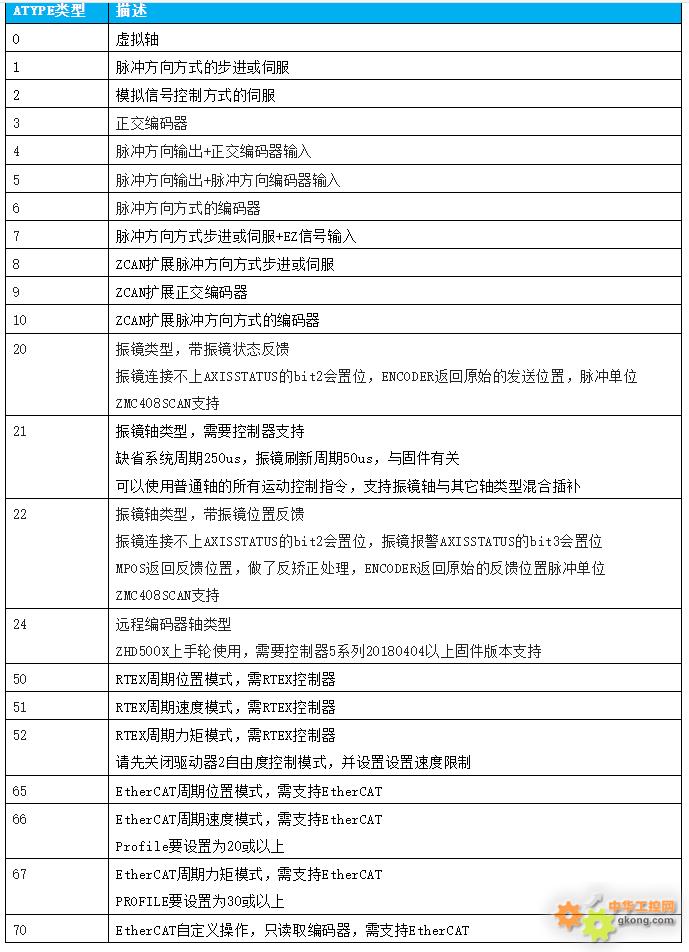
2.ATYPE
ATYPE�O���S����ͣ������������}�_�SATYPE=1/7�������a��������ATYPE=4/5�����a���Ϊ������O��ATYPE=3/6��
3.UNITS
UNITS�O���}�_����������(j��)������һȦ�}�_��(sh��)���ã�����������Ļ�����λ�����O��늙C�D��1°��Ҫ���}�_��(sh��)��������10000���}�_�DһȦ�����O�Þ�UNITS=10000/360��
�Q���Pϵ����UNITS=10000��ֱ������MOVE(5)��ʾ�°l(f��)50000���}�_���\���ٶ�SPEED=10����ʾÿ���°l(f��)100000���}�_��
4.�ٶ�
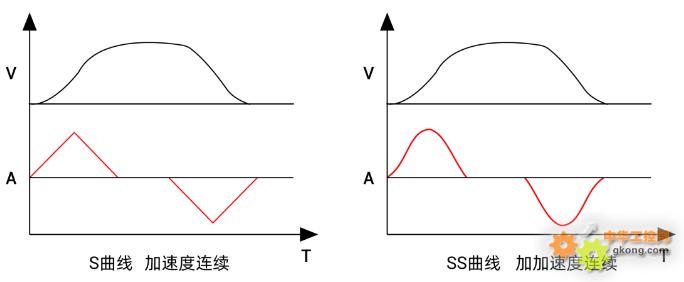
SPEED�\���ٶȡ�ACCEL���ٶȡ�DECEL�p�ٶȵȻ��A�ٶȅ���(sh��)���O�ã�SRAMPָ���O��S���������L���ٵĕr�g���ٶ�׃������ƽ�����p�ٶ��ӣ�VP_MODEָ���O��SS���������ٶ�ƽ��(w��n)�^�ɣ�ʹ܉�E����혣��_����С��
5. �_�J�}�_ģʽ
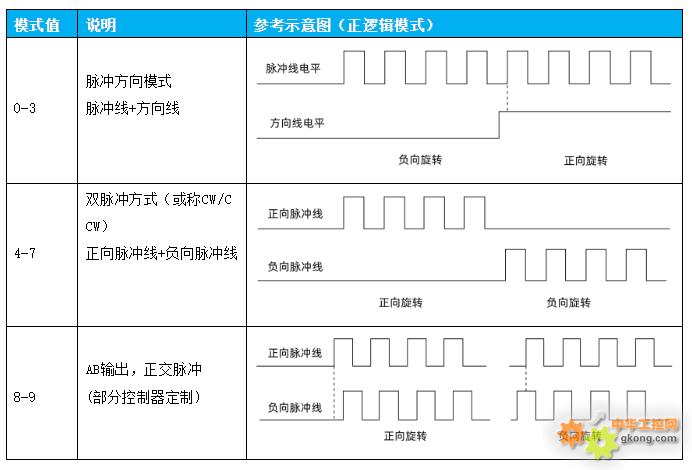
���������SĬ�J���}�_ģʽ���}�_+�����}�_ģʽ��Ҫƥ������\�У���_�J�������}�_ģʽ��
������֧�����N�}�_ģʽ���}�_+�����p�}�_�������}�_��4ϵ�м�����֧�֣����N����/ؓ߉�������á�
�}�_ģʽ��ʹ��INVERT_STEPָ���ʼֵINVERT_STEP=0���}�_+����ģʽ��
�Z��INVERT_STEP = mode
mode��ģʽ�x��ȱʡ0����8λ��λ0-λ7����ʾ��ģʽֵ���£�
����ģʽ�������ƽ���£����O�Ԍ��{�������\�ӷ����cԭ���෴��

��8λ��λ8-λ15����ʾ����׃�����o�r�g����λ�룺0-255
�O�÷�����INVERT_STEP(�S̖) = 256*100+6���p�}�_ģʽ6�����o�r�g100�롣
6.�\��
����ҕ�D�ˆε��ք��\�Ӵ��ڻ��ھ�����l(f��)��MOVEֱ���\��ָ���{ԇ��ͨ�^DPOSĿ��λ�ã���MPOS����λ�ã��ȫ@ȡ�S���\����r��Ҳ�ɲ���ZDevelopܛ����ҕ�D����“ʾ����”���r�ɘ��\�Ӳ��Ρ�
늙C�\�ӷ����c늙C�O���O�ú�INVERT_STEP��/ؓ߉�O�����P��
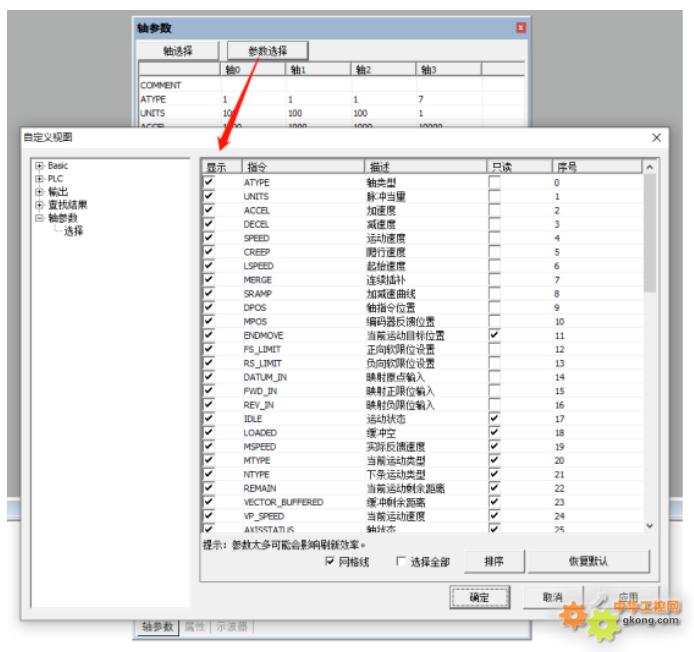
7.����(sh��)�鿴
�S����(sh��)������ɿ���“�S����(sh��)”���ڲ鿴�����r�Ԅ�ˢ�º��@ʾ�S����(sh��)��֧���p��ֱ�������Å���(sh��)��
�S�x�������x��Ҫ�@ʾ���S̖��Ϣ��
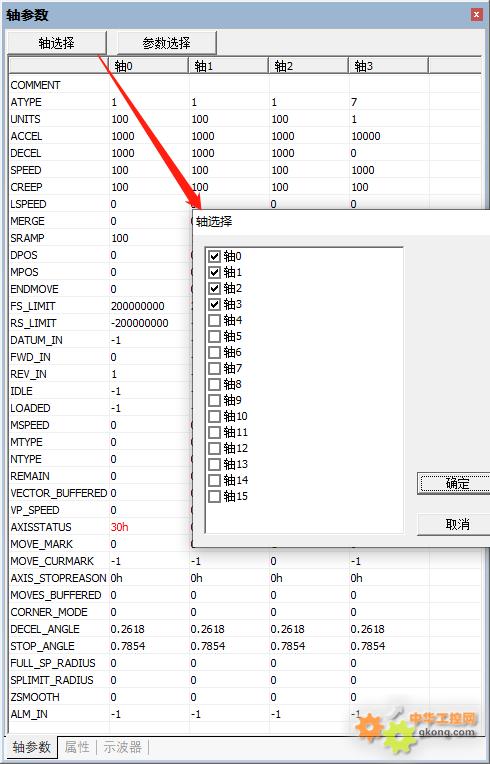
����(sh��)�x�������Զ��x�@ʾ�Pע���S����(sh��)��
8.������
�l(f��)��������ZDevelopܛ����“�����cݔ��”���ڴ�ӡ�e�`��Ϣ��ʾ����a(ch��n)��AXISSTATUS����ʾ��
AXISSTATUS���S��B(t��i)����(sh��)�������Д��S��ǰ�Ƿ�l(f��)����������λ��ʾ������Ϣ���ɶ�N������Ϣ�B�ӣ���ԃ�±��_�J������AXISSTATUS�@ʾ20h����ʾ��ǰ����ؓ��Ӳ��λ���������S����ֹͣ��
AXISSTATUS�@ʾ1000h����ʾ�°l(f��)�}�_�l��̫�죬һ��ֻ���ڸ߷ֱ��ʵ��O����a(ch��n)������}�����F(xi��n)�ˈ�MAX_SPEED�Ĵɽ�Q��

ԇ�\��ǰҪ�_��Ӳ��λ�_�P���óɹ�������C�_�İ�ȫ���o����ֹ�^�_��
�C�_�_�J���Ԅ���֮��ͨ�^DATUMָ�����û���ģʽ��DATUM_INָ������ԭ�c������ӳ�䵽ݔ��ڣ������f����Ҋ�vʷ���¡�
Ӳ��λ�_�P�������S�����“���S���M����”����λ�_�P��Ӳ��λ�_�P�ǰ��b���S�\���г��ϵ������_�PԪ����һ����һ����������Ӳ��λ�_�P��ָ��ӳ�䵽����ݔ���_�P��̖�ϣ�����(j��)�_�P��̖�dz��_߀�dz��]�_���Ƿ�Ҫ����̖�M�з��D���O����ɺ�����Ӳ��λ�_�P�������S����ֹͣ�\�ӣ�ֹͣ�p�ٶȞ�FASTDEC��
ܛ��λ�_�P�������S��“��������”����ָ��ֱ���O����λλ�ã��S�ߵ��O�õ�DPOS����λ�ú��������Üp�ٶ�FASTDECֹͣ�\�ӣ�����(j��)���H��������ܛ��λ��
9.�����Z��
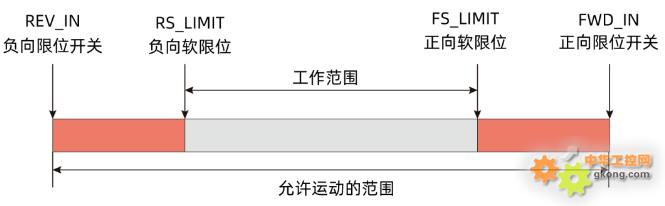
FWD_IN = ����Ӳ��λ�����ݔ��ھ�̖��-1ȡ��ӳ�䣻
REV_IN = ؓ��Ӳ��λ�����ݔ��ھ�̖��-1ȡ��ӳ�䣻
FS_LIMIT = �����\���г����ƣ�ȡ���O���^��ֵ��
RS_LIMIT = ؓ���\���г����ƣ�ȡ���O���^��ֵ��
���磬ZDevelopܛ���·���B(t��i)����ʾaxis0 alarm��ʾ�tɫ�Ĉ��e�`���z���S����(sh��)���S0��AXISSTATUS����(sh��)����ʾ30h������AXISSTATUSָ���f������֪�l(f��)��������ؓ��λ���鿴��λ���ã���FWD_IN(0)=0��REV_IN(0)=1������IN0��IN1�����ã��Լ������P��ݔ���Ƿ�INVERT_IN���D���ƽ��B(t��i)��

�ġ��ք��\�ӿ����{ԇ
�P�]���г�ZDevelop��ܛ����ͬ�rʹ��ZDevelop�B�ӿ����������d�ճ���ǰ���f���ք��O���x��Ҫ�{ԇ���S̖���O���S���ATYPE���}�_����UNITS�����ٶ�ACCEL���p�ٶ�DECEL���ٶ�SPEED��Ȼ����_“ҕ�D”-“�ք��\��”���քӲ���늙Cԇ�\�С�

���������� ��ס“��”/“��”���ţ�늙C���m(x��)�\�ӣ����_ֹͣ�� “ָ��λ��”�@ʾ��ǰ�l(f��)�����}�_DPOS����λ��UNITS�����“���x”����(sh��)���c��“�\��”�����x“�^��”�r��늙C�\�ӵ����x����(sh��)λ�ã������x“�^��”�r��늙C�����x����(sh��)�^�m(x��)�\�ӡ�
�������ϲ��E�O��֮�����늙C�o���\�ӣ������¹�(ji��)�f���Ų顣
һ���}�_�S�Ų鲽�E
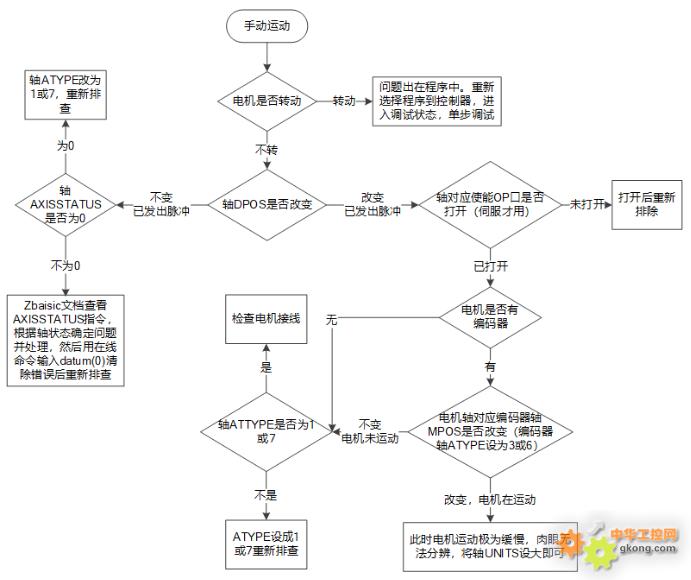
�������e��ʾ
�����Пo����ʾ�����a(ch��n)��������(j��)���e�`�a�ˌ������փ��f����Q�������\�С�
���������Ƿ�a(ch��n)������Ϣ������(j��)ZDevelop��ӡ���e�`��Ϣ���e�`�a��AXISSTATUS�S��B(t��i)��ʾ������e�`�������\�С�
��������(sh��)�O��
�z�����Ѕ���(sh��)�Ƿ��O�ú�����
1.늙C�Ƿ�ʹ�ܳɹ���늙C�S�o�����֓܄Ӽ���ɹ�ʹ�ܣ�
2.�°l(f��)�\�ӵ��S̖һ��Ҫ�x�����_����t�\������o���°l(f��)�oԓ������
3.�S�������(j��)ATYPEָ��ı�������_��ͣ�����e�`�����������e�����o���\�ӣ�
4.UNITS��ֵ�O�ú������}�_�°l(f��)�ٶ�̫С����늙C�����������۟o���ֱ��Ƿ��\�ӣ�
5.�°l(f��)�\��ָ����S����(sh��)����ԓ�S��DPOS�Ƿ��׃��δ׃��ʾ�}�_��δ�l(f��)�����Ų�AXISSTATUS�S��B(t��i)�Пo��ʾ����ǰ�S�ӿ��Ƿ�p�ġ�
�ġ����������_
1.늙Cֻ�܆����\�ӣ�����ԭ���У�
��1��늙C̎����λ��B(t��i)���鿴AXISSTATUS�_�J��
��2��늙C����ģʽ������INVERT_STEP�O�Þ��������}�_ģʽ���p�}�_���}�_+����
��3��늙C�Ӿ����}���_�J�Ӿ���
2.DPOS��MPOS�O���෴����늙C�D���c�A���෴����Q�k����
��늙C�ĘO�ԣ�ͨ�^INVERT_STEPָ�������ܛ���ġ�
�Ӿ��e�`�rע����헣�
�� �z���}�_�Ӿ���늾�·�Ƿ����_��
�� �z���ģ�K�Ƿ����_��늡�
�� �z��ζ˽Ӿ��r�_�JIO�Ƿ���늳ɹ���
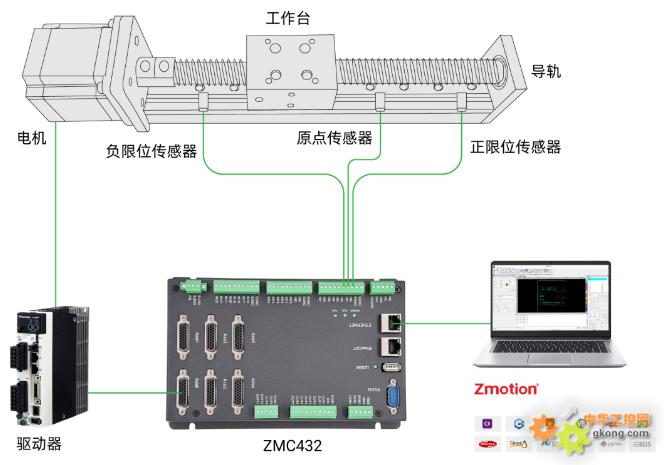
���Σ����\�Ӽ��g EtherCAT�\�ӿ��������}�_�ӿڵĿ����{ԇ�c�\�� ���ͷ������@�� ��
���ྫ�ʃ���Ո�Pע“ ���\��С���� ”����̖����Ҫ���P�_�l(f��)�h(hu��n)���c���̴��a��Ո��ԃ���\�Ӽ��g�N�۹��̎���400-089-8936��
���������\�Ӽ��gԭ��(chu��ng)���gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ��
���\�Ӽ��g��ע���\�ӿ��Ƽ��g�о���ͨ���\�ӿ���ܛӲ���a(ch��n)Ʒ���аl(f��)���LJ��Ҽ����¼��g��I(y��)�����\�Ӽ��g�R���ˁ����A�顢���d�ȹ�˾�ă�(y��u)���˲ţ��ڈԳ�������(chu��ng)�µ�ͬ�r���e�O(li��n)�ϸ����У�f(xi��)ͬ�\�ӿ��ƻ��A���g���о����LJ��ȹ����I��l(f��)չ������I(y��)֮һ��Ҳ�LJ������С����������\�ӿ��ƺ��ļ��g�͌��r����ܛ��ƽ�_���g����I(y��)����Ҫ�I(y��)���У��\�ӿ��ƿ�_�\�ӿ�����_EtherCAT�\�ӿ��ƿ�_EtherCAT������_�\�ӿ���ϵ�y(t��ng)_ҕ�X������__�\�ӿ���PLC_�\�ӿ���_�C���˿�����_ҕ�X��λ_XPCIe/XPCIϵ���\�ӿ��ƿ��ȵȡ�
|

