|
�˂�һ�f(shu��)���ŷ�늙C(j��)�������뵽�ą���(sh��)�{(di��o)����λ��ģʽ���ٶ�ģʽ�������ȵȣ����X(ju��)����ã����Ҫ늙C(j��)�D(zhu��n)����(l��i)��߀Ҫע����N��(w��n)�}����(du��)��һ��(g��)�����|�ŷ����ˁ�(l��i)�v���dz����Ѻá�
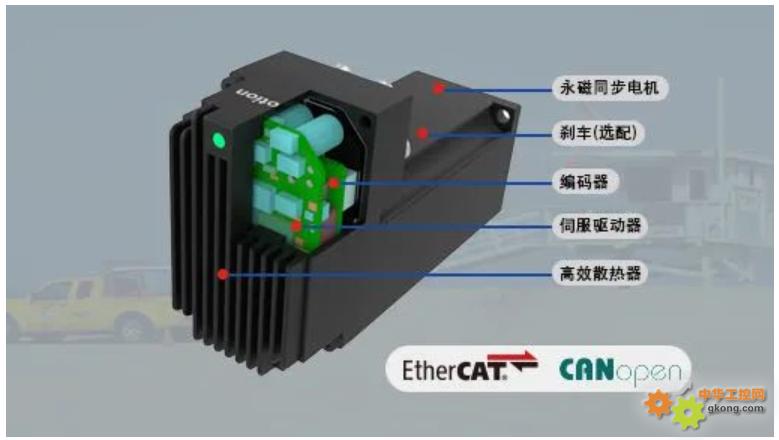
��һ�w���ŷ�늙C(j��)�߶ȼ��ɻ�����늙C(j��)�����a������������һ�w����ȫ������y(t��ng)�ķ��xʽ늙C(j��)��֧��CANopen/EtherCAT����(xi��n)�f(xi��)�h���o�͑�(h��)��N�x��ͬ�r(sh��)���˝M(m��n)����y(t��ng)�ŷ�ʹ���ߵ�����߀�e�_(k��i)�l(f��)��ģ�M�����ơ�ռ�ձ��{(di��o)�١�����}�_ݔ����Ƶȡ����A(y��)�O(sh��)����(sh��)���Y(ji��)����λ�C(j��)�̳̣���ʹ���W(xu��)��Ҳ���p���ƿء�
�҂��м����Գ���(qi��ng)�Ķ�ο���ģʽ�����DIʹ�ã����@��(g��)������(l��i)�Dz��Ǻ�(f��)�s����(hu��)����(hu��)���úܶ�ą���(sh��)�������_�ĸ��V�㣬����Ҫ�������҂��́�(l��i)�����@��(g��)����Ĺ��ܵ�����ô�ã�
ʲô�Ƕ��λ��/����ٶ�
��ι�����Ҫ�֞���λ�ù��ܺͶ���ٶȹ��ܣ�ÿһ�N���ܶ������Nʹ�÷�ʽ��?ji��n)δ��\(y��n)�У�ѭ�h(hu��n)�\(y��n)�У��Լ�DI�ГQ�\(y��n)�С���˾�ŷ�늙C(j��)��ο��ƹ��ܞ�͑�(h��)��(zh��n)��16�ο��ƣ�ÿ�ο��ƿ����`�������ٶȡ�λ�ơ��Ӝp�ٕr(sh��)�g���\(y��n)�Еr(sh��)�g�Լ��ȴ��r(sh��)�g��

�����҂��Զ��λ���M(j��n)���v�⣺
�δ��\(y��n)�У��͑�(h��)���Ը���(j��)�Լ���ʹ���������úö��λ���\(y��n)������ą���(sh��)���o늙C(j��)ʹ����̖(h��o)��늙C(j��)���Ñ�(h��)���õĵ�һ��λ���_(k��i)ʼ�\(y��n)�У�һֱ�\(y��n)�е��Ñ�(h��)���õ����һ��ֹͣ������(g��)���̽Y(ji��)����
ѭ�h(hu��n)�\(y��n)�У��δ��\(y��n)�е�����(j��)�棬ѭ�h(hu��n)Ҳ���Ԇδ��\(y��n)�О����ڣ�ͨ�^(gu��)�O(sh��)��ѭ�h(hu��n)�Δ�(sh��)����(l��i)��(sh��)�F(xi��n)����\(y��n)�У������@�Nģʽ�������@���壬��?y��n)�ֻ�ĵ�һ�������\(y��n)�е����һ�Σ��o(w��)���S�������Ŀ������е�����Ρ�
DI�ГQ�\(y��n)�У���Ȼ�Ǟ��ˏ��a(b��)��ǰ�Ķ̰壬ͨ�^(gu��)4��(g��)DI���M(j��n)�ж��M(j��n)�ƾ��a����0-15���S���ГQ����������(j��)���y(t��ng)���������(du��)���ɺܶ࣬�@Ҳ��Q�˿͑�(h��)�ĺܶ���(w��n)�}.
��С�Nʿ�����˷N���λ��ģʽ���H���ڿ͑�(h��)��ϣ������(xi��)���s�ij��������댍(sh��)�F(xi��n)��ο��Ƶ���r��ʹ�ã����ӏ�(f��)�s�Ĺ���߀����Ҫͨ�^(gu��)�҂��Ŀ���(xi��n)�f(xi��)�h��(l��i)��(sh��)�F(xi��n)��
�����ݾ�
�f(shu��)���ٺã�Ҳ����һԇ��ǰ���섂�п͑�(h��)�o�ҳ��˂�(g��)�y�}��ǡ�����ö��λ�Á�(l��i)��(sh��)�F(xi��n)�ģ�����(l��i)�҂��f(shu��)����Ό�(sh��)�F(xi��n)��(ji��n)�εĶ��λ�ÿ��ơ�
�͑�(h��)�����͑�(h��)ʹ��PLC����늙C(j��)��ͣ��ֻ�ṩһ��(g��)ݔ����̖(h��o)�o��˾늙C(j��)����ݔ����̖(h��o)��������������_(k��i)�P(gu��n)��������PLC�����ⲿ�](m��i)���}�_�o����늙C(j��)�\(y��n)��(d��ng)����o(w��)���ГQ���̶���һ��(g��)���ɣ�늙C(j��)��Ҫ��(sh��)�F(xi��n)�D(zhu��n)��(d��ng)�̶����}�_��һֱ����һ��(g��)�����\(y��n)���@�ɷNģʽ����(ji��n)�θ��������ٶ�ģʽ��λ��ģʽ�ГQ��
ǰ��߀��������ֻ�oһ��(g��)ݔ����̖(h��o)Ҳ���ԣ����o�}�_���҂�늙C(j��)�Լ����l(f��)�}�_�����ГQ����Ҳ�܌�(sh��)�F(xi��n)�������@��(g��)�ГQģʽ�_��(sh��)���y�㣬����˾늙C(j��)���w���l(f��)��ÿ��(g��)����ģʽ���Ǫ�(d��)���ģ��ڲ�ͨ�^(gu��)�l(f��)��ָ���ǰ���£���(sh��)�F(xi��n)λ�ÿ��ƺ��ٶȿ����ГQ��ֻ��һЩ�͑�(h��)����Ʒ���ŕ�(hu��)�����ij����(l��i)�M(m��n)�㡣������r���ڬF(xi��n)�Зl�������y�Ԍ�(sh��)�F(xi��n)�ģ�
���ǏĿ͑�(h��)������l(f��)���м�(x��)��(du��)���҂��Ĺ��ܣ��l(f��)�F(xi��n)�H���λ�ñ����ƥ�������w��(sh��)�F(xi��n)���£��͑�(h��)�f(shu��)��һֱ�D(zhu��n)�����Ǜ](m��i)�����Ƶģ�늙C(j��)Ҳ���dz��m(x��)���\(y��n)�D(zhu��n)�����x���ޣ����Խo��һ��(g��)�����λ�ã���������̕r(sh��)�g�\(y��n)�е��ٶ�ģʽ���O(sh��)�����£�
��һ�����O(sh��)�Þ�Nimotionλ��ģʽ�����λ������˾Nimotionģʽ�µ�һ��(g��)��֧��

�ڶ������O(sh��)��λ��ָ���(l��i)Դ(λ�õĽo����N���ӣ��҂��@���x����λ�ã�

���������O(sh��)�ö��λ���\(y��n)�з�ʽ���x���`���DI�ГQ�\(y��n)�У�

���IJ���λ��ָ���(l��i)���x��Ĭ�J(r��n)����(du��)λ�ã����\(y��n)����ʼ���x��Ĭ�J(r��n)��1��

���岽�������\(y��n)�Ѕ���(sh��)�O(sh��)�ã������O(sh��)�Ãɂ�(g��)�Σ�һ��(g��)�������M(j��n)��λ��ģʽ��һ��(g��)�������(l��i)�ٶ�ģʽ��Ҳ���ǽoһ��(g��)�ܴ��λ�ã�

���������͑�(h��)Ҫ��ʹ��һ��(g��)�_(k��i)�P(gu��n)�M(j��n)���ГQ����ô��Ҫ��(sh��)�F(xi��n)�ɶ��ГQ������Ҫ2��(g��)DI�ſ��Ԍ�(sh��)�F(xi��n)��������Ҫ����̓�M����һֱ�o0�Ġ�B(t��i)���@��DI�ГQֻ��Ҫ�ГQһ��(g��)�Ϳ��Ԍ�(sh��)�F(xi��n)�ٶ�ģʽ��λ��ģʽ���ГQ�ˡ����w���£�

��(ji��n)�ε��v���������˃ɂ�(g��)�_(k��i)�P(gu��n)������һ��(g��)һֱ��OFF�Ġ�B(t��i)�������ГQ��λ��ģʽ�nj�DI2׃?y��u)�OFF��Ҳ���ǵ�0��.�ГQ���ٶ�ģʽ���nj�DI2׃?y��u)?�����ǵ�3�Ρ�
�@�Ӿͺ�(ji��n)�εČ�(sh��)�F(xi��n)�˿͑�(h��)�������mȻֻ��һ��(g��)�ܺ�(ji��n)�εđ�(y��ng)�ã�����Ҳ���Կ����˹��ܵļ����Ժ�(qi��ng)������ֻ����˾늙C(j��)���ܺ�С��һ���֣����˽���࣬Ո(q��ng)�P(gu��n)ע�҂���
|

