ĪĪĪĪ×ķ║Į┐š║Į╠ņŅIė“Ą─┐═æ¶įOėŗ¤oōpÖz£yŽĄĮy¤oę╔╩Ūę╗ĒŚśOŠ▀╠¶æąįĄ─╚╬äšĪŻ╝┤▒Ń┤²Öz£yĄ─▓┐╝■▓╗╔µ╝░ÖC├▄Ż¼Ą½ļSų°Ų¾śIī”įOėŗĄ─▓╗öÓā×╗»Ż¼╦³éāę▓┐╔─▄┐ņ╦┘ūā╗»ĪŻ“Öz£yŅÉą═Ą─▀xō±╚ĪøQė┌▓┐╝■Ą─Äū║╬ą╬ĀŅĪó▓─┴Ž│╔Ęųęį╝░ąĶę¬Öz£yĄ─╚▒Ž▌ŅÉą═ĪŻ”Innerspec ŽĄĮy╣ż│╠┐é▒O Cory Grant ▒Ē╩ŠĪŻ“╬ęéā╗“įSāH─▄Įė╩šĄĮėąŽ▐öĄ┴┐Ą─śėŲĘęį╣®“×╩š£yįćų«ė├Ż¼Ą½╬ęéā▒žĒÜ×ķĖ„ĘNŪ░╦∙╬┤ęŖĄ─▓┐╝■įOėŗįOéõĪŻę“┤╦Ż¼┐╔ęįšfŻ¼╬ęéā╩Ūį┌ć·└@╬┤ų¬ģóöĄ▀Mąą╣żū„Ż¼┴”Ū¾ūīįOéõŠ▀éõ▒M┐╔─▄ČÓĄ─═©ė├ąįĪŻ”
ĪĪĪĪInnerspec ╣½╦Šūį 1989 ─Ļ│╔┴óęįüĒŻ¼╩╝ĮK▒Ż│ųų°¤oōpÖz£yŽĄĮyŅIė“Ž╚“īš▀Ą─ĮŪ╔½ĪŻįō╣½╦Š┐é▓┐╬╗ė┌Ėź╝¬─ßüåų▌Ą─ĖŻ└’╦╣╠žŻ¼Ųõ╣ż│╠ĤłFĻĀīŻūóė┌×ķ║Į┐š║Į╠ņĪóĮ╗═©▀\▌öĪó─▄į┤Ą╚ČÓéĆŅIė“Ą─ŅI▄ŖŲ¾śIįOėŗ▓ó┤“įņČ©ųŲ╗»Ą─¤oōpÖz£yŽĄĮyĪŻ╦¹éā▀Ćķ_░l┴╦ļŖ┤┼│¼┬ĢŻ©EMATŻ®Ą╚Ž╚▀MĄ─Öz£y╝╝ągŻ¼įō╝╝ągį┌æ¬ė├Ģr¤oąĶę└┘ćę║¾w│¼┬Ģ±Ņ║Žä®ĪŻ×ķ┴╦ØMūŃ▓╗═¼┐═æ¶Ą─ČÓśė╗»ąĶŪ¾Ż¼įō╣½╦Š╠ß╣®┴╦ČÓĘNÖz£yŅÉą═Ż¼░³└©│¼┬Ģ▓©Öz£yŻ©UTŻ®Īó£u┴„Öz£y║═ŽÓ┐žĻć│¼┬ĢÖz£yŻ©PAUTŻ®ĪŻ
ĪĪĪĪ
ĪĪĪĪĮĶų· EtherCAT Ą─¤ß▀BĮė╣”─▄Ż¼ļpÖCŲ„╚╦ŽĄĮy─▄ē“čĖ╦┘Ė³ōQÖCąĄ▒█─®Č╦╣żŠ▀Ż¼īŹ¼FÖz£yŅÉą═Ą─┐ņ╦┘ŪąōQŻ¼Å─Č°┤¾Ę∙╠ß╔²ŽĄĮyĄ─ņ`╗ŅąįĪŻ
ĪĪĪĪInnerspec æ{ĮĶ▒ČĖŻ╠ß╣®Ą─ķ_Ę┼Ūę┐╔öUš╣╝╝ągĄ─Ė▀Č╚ņ`╗ŅąįŻ¼│╔╣”ØMūŃ┴╦Ė„ŅÉ▓┐╝■╝░Öz£yĘĮĘ©Ą─īŹļHąĶŪ¾ĪŻ“▒ČĖŻĄ─ūįäė╗»╝╝ąg└Ē─Ņ┼c╬ęéā▓╗ų\Č°║ŽĪŻ”Cory Grant šfĄ└Ż¼“╦¹éā╠ß╣®ķ_Ę┼ņ`╗ŅĄ─╣żŠ▀ęį╝░įö▒M╚½├µĄ─╬─Ön┘Y┴ŽŻ¼╩╣ė├æ¶─▄ē“Ė∙ō■Š▀¾wĄ─æ¬ė├ąĶŪ¾Č©ųŲ║═ā×╗»«aŲĘĪŻ”
ĪĪĪĪī”ĻPµI▓┐╝■▀Mąą╚½├µ£yįć
ĪĪĪĪInnerspec čą░lĄ─ Robotic Twin ŽĄĮy┐éėŗ╝»│╔┴╦ 18 éĆģf═¼▀\äėĄ─▌SŻ¼░³└©ā╔éĆ░▓čbį┌▄ēĄ└╔ŽĄ─ÖCŲ„╚╦Īóę╗éĆė├ė┌£u┴„Öz£yĄ─▐D▒PĪóę╗éĆŠĆąįą²▐Dł╠ąąŲ„Ż¼ęį╝░ę╗éĆ╚▌┴┐▀_ 5000 ╝ėü÷Ż©╝s 19000 ╔²Ż®Ą─│¼┬ĢÖz£y╦«ŽõŻ¼įō╦«Žõā╚▓┐▀Ć┼õéõ┴╦ę╗éĆ▐D▒PŻ¼─▄ē“╠Ä└Ēųž┴┐Ė▀▀_ 3000 ░§Ż©1360 Ū¦┐╦Ż®Ą─▓┐╝■ĪŻ
ĪĪĪĪ
ĪĪĪĪInnerspec Technologies įOėŗ┴╦ę╗╠ūļpÖCŲ„╚╦¤oōpÖz£yŽĄĮyŻ¼ų╝į┌ØMūŃŲõ║Į┐š║Į╠ņŅIė“ųžę¬┐═æ¶Ą─Å═ļsÖz£yąĶŪ¾ĪŻ
ĪĪĪĪį┌▀@éĆŽĄĮyųąŻ¼ūįäė╗»ĮM╝■─▄ē“┤_▒Ż£yįćöĄō■į┌╣żśIĘ■äšŲ„╝░ā╔┼_Ą┌╚²ĘĮ PC ų«ķgīŹ¼F¤o┐p╣▓ŽĒĪŻŲõųąŻ¼ę╗┼_ PC žōž¤▓╔╝»║═░▓╚½┤µā”öĄō■Ż¼Č°┴Ēę╗┼_ PC ät╣®Š▀éõīŻśI╝╝─▄Ą─╚╦åT▀Mąą╩ųäėĘų╬÷ĪŻ
ĪĪĪĪCory Grant į┌¤oōpÖz£yŽĄĮyĮ©įņŅIė“Ą─│§┤╬ćLįćŻ¼╩Ū┼cę╗╝ꎥĮy╝»│╔╔╠öy╩ų║Žū„═Ļ│╔Ą─ĪŻį┌─Ū└’Ż¼╦¹ėHč█ęŖūC┴╦▒ČĖŻĄ─ EtherCAT ╝╝ąg║═╗∙ė┌ PC Ą─┐žųŲ╝╝ąg╚ń║╬×ķ£yįć£y┴┐æ¬ė├ŅIė“┤“įņę╗éĆ╝╚ÅŖ┤¾ėųņ`╗ŅĄ─ŲĮ┼_ĪŻūį 2021 ─Ļ╝ė╚ļ Innerspec ęįüĒŻ¼╦¹▒Ń┼c╣½╦Šā╚▓┐Ą─╣ż│╠łFĻĀ║Žū„Ż¼ķ_╩╝▐DŽ“▓╔ė├▒ČĖŻ╝╝ągĪŻ
ĪĪĪĪįńį┌ 2015 ─ĻŻ¼╬ęŠ═ķ_╩╝īżšę─Ūą®╚┌╚ļ┴╦▄ø╝■ķ_░lįŁätĪó░µ▒Š┐žųŲĪóĮYśŗ╗»╬─▒Šęį╝░├µŽ“ī”Ž¾ŠÄ│╠╦╝ŽļĄ─Ė³×ķņ`╗ŅĄ─┐žųŲŽĄĮyĪŻį┌▀@ą®ĘĮ├µŻ¼┼c▒ČĖŻĄ─║Žū„ę╗ų▒×ķ╬ęéāĦüĒ┴╦Š▐┤¾Ą─ā×ä▌ĪŻ
ĪĪĪĪ—— Grant
ĪĪĪĪūįäė╗»▄ø╝■╝ė╦┘ķ_░l▀M│╠
ĪĪĪĪō■ Innerspec īŻ╝ęĮķĮBŻ¼▒ČĖŻĄ─ TwinCAT ▄ø╝■╩Ū╠ß╔²¤oōpÖz£yŽĄĮyąį─▄║═ņ`╗ŅąįĄ─ĻPµI╦∙į┌ĪŻįō▄ø╝■▓╗āH║å╗»┴╦ PLC ║═ PTP ▀\äė┐žųŲĄ─īŹ¼FŻ¼▀Ć×ķūįäė╗»Ą─Ė„éĆīė├µ╠ß╣®┴╦Č╦ĄĮČ╦Ą─ķ_░l║═ Runtime ŁhŠ│ĪŻ“Ą├ęµė┌ TwinCAT ┼c Microsoft Visual Studio® Ą─╝»│╔Ż¼╣ż│╠Ĥéā─▄ē“╩╣ė├ūŅ▀m║ŽŲõæ¬ė├ąĶŪ¾Ą─ŠÄ│╠šZčį▀Mąąķ_░lĪŻ”▒ČĖŻõN╩█Įø└Ē Rodney Reid šfĄ└Ż¼“▀@ą®šZčį░³└©├µŽ“ī”Ž¾Ą─ IEC 61131-3 ś╦£╩šZčįĪóūįČ©┴x║═ŅAČ©┴xĄ─╣”─▄ēKŻ¼ęį╝░ C#ĪóC++ ║═ Python Ą╚ėŗ╦ŃÖC┐ŲīWšZčįĪŻ”Cory Grant │õĘų└¹ė├┴╦▀@ę╗ā×ä▌Ż¼┤┘▀M┴╦┐žųŲ╣ż│╠Ĥ┼c▄ø╝■╣ż│╠Ĥų«ķgĄ─ģf═¼║Žū„ĪŻ╦¹éā╣▓═¼į┌ TwinCAT HMI ųą┤ŅĮ©┴╦įOéõĄ─▓┘ū„Įń├µŻ¼įōĮń├µų¦│ų HTML5 ║═ JavaScript Ą╚ŠWĒōįOėŗś╦£╩Ż¼─▄ē“┤“įņ│÷Š▀ėą¼F┤·ĖąĄ─ė├涾w“ׯ©UXŻ®ĪŻ
ĪĪĪĪTwinCAT XML Server ę▓×ķ Innerspec Ą─ŽĄĮyį÷╠Ē┴╦ā×ä▌ĪŻ┤╦╣”─▄░³║¼ę╗éĆ PLC ÄņŻ¼╩╣Ą├ė├æ¶┐╔ęįĘĮ▒ŃĄžūxīæįLå¢ū„×ķūā┴┐┤µā”į┌ PLC ųąĄ─ XML öĄō■ĪŻ“═©▀^▀@ĘNĘĮ╩ĮŻ¼╬ę─▄ē“īó╦∙ėą┼õų├įOų├╠Ē╝ėĄĮ XML ╬─╝■ųąĪŻę“┤╦Ż¼¤ošō┐═æ¶╩Ūį┌▀Mąąą┬▓┐╝■Ą─įOų├▀Ć╩ŪŠSūo╣żū„Ż¼TwinCAT XML Server Č╝─▄’@ų°╠ß╔²ŽĄĮyĄ─┐╔öUš╣ąįĪó═Ė├„Č╚ęį╝░┐╔┐žąįĪŻ”Cory Grant ĮŌßīĄ└ĪŻ
ĪĪĪĪ
ĪĪĪĪ╬╗ė┌Ėź╝¬─ßüåų▌ĖŻ└’╦╣╠žĄ─ÖCŲ„╚╦¤oōpÖz£yųąą─ĒŚ─┐łFĻĀŻ©Å─ū¾ų┴ė꯮Ż║ųŲįņĮø└Ē Jim FentonĪóĒŚ─┐╣ż│╠Ĥ Joseph Ziedas ║═ŽĄĮy╣ż│╠┐é▒O Cory GrantŻ©Š∙üĒūį Innerspec ╣½╦ŠŻ®Ż¼ęį╝░üĒūį▒ČĖŻĄ─õN╩█╣ż│╠Ĥ Rodney Reid ║═æ¬ė├╣ż│╠Ĥ Jack PlylerĪŻ
ĪĪĪĪ║Į┐š║Į╠ņ£yįćųąą─Ą─║╦ą─┐žųŲŽĄĮy
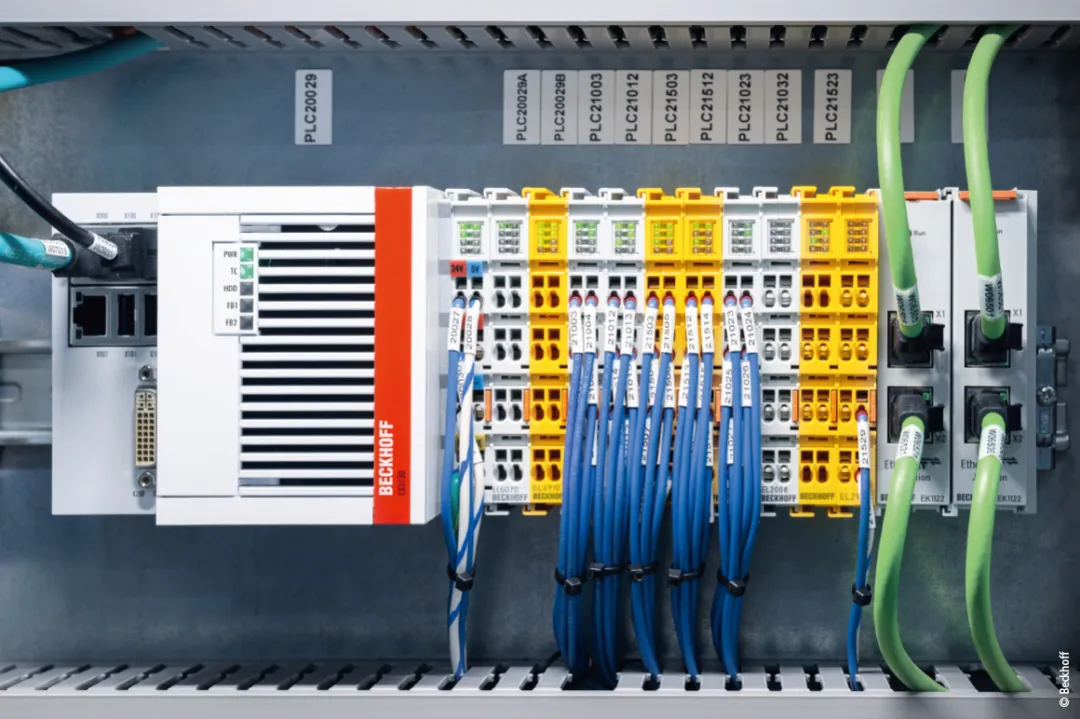
ĪĪĪĪ▒ČĖŻ CX5130 ŪČ╚ļ╩Į┐žųŲŲ„ė├ū„š¹éĆŽĄĮyĄ─įOéõ┐žųŲŲ„ĪŻCX5130 ═©▀^ų▒Įė▀BĮėĄ─ EtherCAT Č╦ūė─ŻēKÅ─ÖCąĄ▒█─®Č╦╣żŠ▀Ą─Ė„ŅÉé„ĖąŲ„ųą▓╔╝»öĄō■Ż¼▓ó╩╣ė├ TwinCAT IoT ųąĄ─ OPC UA ║═ MQTT ╣”─▄īó▀@ą®öĄō■░l╦═ų┴ŽĄĮyĄ─Ę■äšŲ„║═Ęų╬÷ PC ųąĪŻ▀@┐ŅČÓ║╦įOéõ┐žųŲŲ„æ{ĮĶŲõśO┐ņĄ─ų▄Ų┌ĢrķgŻ¼─▄ē“ų¦│ųė╔ AM8000 ╦┼Ę■ļŖÖC║═ AX5206 ╦┼Ę■“īäėŲ„“īäėĄ─╦─éĆ╦┼Ę■▌Sęį╝░ 16 éĆĄ┌╚²ĘĮļŖÖC║═ā╔éĆÖCŲ„╚╦┐žųŲŲ„īŹ¼FĖ▀Š½Č╚Ą─▀\äė┐žųŲĪŻ
ĪĪĪĪūŅĮKśŗĮ©┴╦ę╗éĆ─▄ē“į┌╦«Ž┬Öz£yų▒ÅĮ▀_ 100 ėó┤ńŻ©250 └Õ├ūŻ®Īóųž┴┐▀_ 2500 ░§Ż©│¼▀^ę╗揯®Ą─▓┐╝■Ą─Ė▀ąį─▄ŽĄĮyĪŻ“į┌▐D▒P╔²ĮĄ▀^│╠ųąŻ¼TwinCAT Ą─▄ø╝■²X▌åÄņ─▄ē“═Ļ├└ĄžīŹ¼FļŖÖCĄ─═¼▓Į┐žųŲĪŻ”Cory Grant šfĄ└Ż¼“«ö▐D▒PĮėĮ³╦«ŽõĄū▓┐ĢrŻ¼╦┼Ę■ŽĄĮyĢ■ūįäėÅ─╬╗ų├┐žųŲ─Ż╩ĮŪąōQų┴┼żŠž┐žųŲ─Ż╩ĮĪŻ╬ęéā═©▀^š{š¹ļŖÖCų┴ŅAįO┼żŠžŻ¼īó┐“╝▄═Ų╦═ų┴╦«ŽõĄū▓┐Ż¼╩╣Ųõ┼cą©ą╬ė▓┘|ō§ēKŠo├▄Įėė|Ż¼▀MČ°īóŲõ╣╠Č©ĄĮ╬╗ĪŻ▀@śėŻ¼Š▐┤¾Ą─▓┐╝■╝┤▒Ńęį├┐ĘųńŖ 30 ▐DĄ─╦┘Č╚Ė▀╦┘ą²▐DŻ¼ę└╚╗─▄ē“▒Ż│ųĘĆČ©ĀŅæBĪŻ”
ĪĪĪĪ
ĪĪĪĪ▒ČĖŻĄ─ CX5130 ŪČ╚ļ╩Į┐žųŲŲ„ė├ū„ÖCŲ„╚╦£yįćųąą─Ą─║╦ą─įOéõ┐žųŲŲ„ ĪŻ
ĪĪĪĪā╔éĆļp═©Ą└ AX5206 ╦┼Ę■“īäėŲ„žōž¤×ķ╚½▓┐╦─┼_▒ČĖŻļŖÖC╠ß╣®äė┴”ĪŻ╦³éā▀Ć═©▀^ TwinSAFEĪŻų▒Įėį┌“īäėŲ„ĮM╝■ųą╝»│╔┴╦░▓╚½╣”─▄ĪŻ═©▀^▓╔ė├ Safety over EtherCATŻ©FSoEŻ®═©ą┼ģfūhŻ¼ŽĄĮy─▄ē“ų¦│ųę╗ŽĄ┴ą░▓╚½ŽÓĻPĄ─“īäė╣”─▄Ż¼░³└© STOĪóSS1 ║═ SS2ĪŻ
ĪĪĪĪEtherCAT Ą─īŹĢr═©ą┼╣”─▄╩╣Ą├Ė„éĆ▀\äė▌Sų«ķg─▄ē“īŹ¼FĖ▀Š½Č╚Ą─═¼▓Į┐žųŲĪŻ┤╦═ŌŻ¼═©▀^å╬ļŖ└|╝╝ąg (OCTŻ®īó╣®ļŖ║══©ą┼╣”─▄╝»ė┌ę╗¾wŻ¼ėąų·ė┌£p╔┘▀@éĆ╝s 120 ėó│▀Ż©╗“╝s 36 ├ūŻ®ķLĄ─ŽĄĮy╦∙ąĶĄ─▓╝ŠĆĢrķg║═│╔▒ŠĪŻ
ĪĪĪĪė╔ė┌ŽĄĮyįŁ╔·ų¦│ų EtherCATŻ¼ę“┤╦═Ļ╚½Ž¹│²┴╦┼cÖCŲ„╚╦ų«ķgĄ─═©ą┼šŽĄKŻ¼Å─Č°╩╣╬ęéā─▄ē“Ė³▌p╦╔Ąž╝┤ĢrĖ³ōQÖCąĄ▒█─®Č╦╣żŠ▀ĪŻį┌▀@└’Ż¼EtherCAT Ą─¤ß▀BĮė╣”─▄ų·┴”╬ęéāņ`╗Ņ▀mæ¬Ė„ŅÉÖz£yąĶŪ¾ĪŻ
ĪĪĪĪ—— Innerspec ╣½╦ŠĒŚ─┐╣ż│╠Ĥ
ĪĪĪĪJoseph Ziedas
ĪĪĪĪ¤o┐p╝»│╔ĦüĒąį─▄’@ų°╠ß╔²
ĪĪĪĪInnerspec │╔╣”ØMūŃ┴╦Ųõ║Į┐š║Į╠ņŅIė“ųžę¬┐═æ¶╦∙ėąśO×ķć└Ė±Ą─╝╝ągę¬Ū¾ĪŻļpÖCŲ„╚╦¤oōpÖz£yŽĄĮyŠ▀éõśOĖ▀Ą─ņ`╗ŅąįŻ¼─▄ē“▌p╦╔æ¬ī”╬┤üĒ┐╔─▄│÷¼FĄ─Ė„ĘNą┬▓┐╝■╗“ą┬╣ż╦ć╠¶æĪŻ▐DŽ“▓╔ė├▒ČĖŻ╝╝ąg┤_▒Ż┴╦ŽĄĮyąį─▄Ą─’@ų°╠ß╔²ĪŻ└²╚ńŻ¼Cory Grant ─▄ē“ŠÄīæūįČ©┴xĄ─ C++ ┤·┤aŻ¼▓ó└¹ė├ TwinCAT ╣”─▄▀Mąą▓┐╩Ż¼Č°¤oąĶę└┘ćÖCŲ„╚╦┐žųŲŲ„Ą─╗∙ĄA╣”─▄üĒė|░l╣żŠ▀Ż║“ĮĶų·Äņ┐©Ą─ Fast Send DriverŻ¼├┐┤╬Ė³ą┬Ą─Ģrķg┐╔ęį┐sČ╠ų┴ 1 ║┴├ļŻ¼Ą½╩╣ė├╬ęéāį┌ TwinCAT Ą─ C++ ─ŻēKųąīŹ¼FĄ─▄ø╝■╦ŃĘ©Ż¼āHąĶ╝s 100 ╬ó├ļ╝┤┐╔═Ļ│╔Ė³ą┬ĪŻę“┤╦Ż¼╬ęéā╗∙▒Š╔Ž─▄ē“ęį▒╚ęį═∙┐ņ 10 ▒ČĄ─╦┘Č╚ė|░lāxŲ„Ż¼Å─Č°śO┤¾╠ß╔²┴╦Öz£y╦┘Č╚║═£╩┤_ąįĪŻ”
ĪĪĪĪ▒ČĖŻ╗∙ė┌ PC Ą─┐žųŲ╝╝ąg▀Ć═©▀^ TwinCAT HMIŻ©ā╚ų├ EtherCAT į\öÓęĢłDŻ®║═ TwinCAT XML Server ▀Mę╗▓Įį÷ÅŖ┴╦▓┘ū„╚╦åTĄ─Į╗╗ź¾w“ׯ¼Cory Grant ĮŌßīĄ└Ż║“╬ęį┌śŗĮ©ŽĄĮyĢrįOČ©┴╦ā╔éĆų„ę¬─┐ś╦Ż║ę╗╩ŪūīįOéõ▓┘ū„╚╦åTØMęŌŻ¼Č■╩ŪūīŠSūo╚╦åTØMęŌĪŻī”ė┌ļpÖCŲ„╚╦ŽĄĮyŻ¼╬ęéā╔Ņų¬▓┘ū„╚╦åTŲ½É█ÖCŲ„Ą─═Ōė^įOėŗĪó▓┘ū„╩ųĖąĪóė├æ¶Įń├µŻ¼ęį╝░Ųõū┐įĮĄ─ĘĆČ©ąį║═ņ`╗ŅąįĪŻ”
ĪĪĪĪ
ĪĪĪĪĻPė┌Ą┬ć°▒ČĖŻ
ĪĪĪĪ▒ČĖŻŻ©BeckhoffŻ®╩Ūę╗╝ęīŻūóė┌ūįäė╗»ą┬╝╝ągĄ─Ą┬┘YŲ¾śIŻ¼äō┴óė┌ 1980 ─ĻŻ¼┐é▓┐╬╗ė┌Ą┬ć°═■Ā¢╩ąĪŻū„×ķ╚½Ū“ūįäė╗»╝╝ągĄ─“īäėš▀Ż¼▒ČĖŻČ©┴x┴╦ūįäė╗»ŅIė“Ą─įSČÓś╦£╩Ż¼╩Ūć°ļHś╦£╩Ą─ųŲČ©š▀║══Ųäėš▀ĪŻ╣½╦Š╦∙╔·«aĄ─╣żśI PCĪó¼Fł÷┐éŠĆ─ŻēKĪó“īäė«aŲĘ║═ TwinCAT ūįäė╗»▄ø╝■śŗ│╔┴╦ę╗╠ū═Ļš¹Ą─ĪóŽÓ╗ź╝µ╚▌Ą─┐žųŲŽĄĮyŻ¼┐╔×ķĖ„éĆ╣ż┐žŅIė“╠ß╣®ķ_Ę┼╩Įūįäė╗»ŽĄĮy║══Ļš¹Ą─ĮŌøQĘĮ░ĖĪŻĮø▀^ 40 ─ĻĄ─░lš╣║═┼¼┴”Ż¼▒ČĖŻęčį┌╩└ĮńĖ„ĄžįO┴ó 30 ČÓ╝ęĘųų¦ÖCśŗŻ¼╝ė╔Ž╚½Ū“Ą─║Žū„╗’░ķŻ¼śIäš▒ķ╝░ 70 ČÓéĆć°╝ę║═Ąžģ^ĪŻ
ĪĪĪĪ▒ČĖŻė┌ 1997 ─Ļ▀M╚ļųąć°╩ął÷Ż¼ųąć°ģ^┐é▓┐┬õæ¶ė┌╔Ž║Ż╩ą▒▒Ė▀ą┬«aśIł@ģ^Ż¼¼FėąåT╣ż 300 ╚╦Ż¼▐k╩┬╠Ä▒ķ╝░ć°ā╚ 30 ū∙┤¾ųą│Ū╩ąĪŻäōą┬«aŲĘ║═ĮŌøQĘĮ░ĖÅVĘ║æ¬ė├ė┌’L┴”░lļŖĪó░ļī¦¾wĪó╣ŌĘ³╠½Ļ¢─▄ĪóļŖūėųŲįņĪóĮī┘╝ė╣żĪó░³čbÖCąĄĪóėĪ╦óÖCąĄĪó╦▄┴Ž╝ė╣żĪó▌å╠ź╝ė╣żĪó─Š▓─╝ė╣żĪó▓Ż┴¦ÖCąĄĪó╬’┴„▌ö╦═ęį╝░śŪėŅūįäė╗»Ą╚▒ŖČÓŅIė“ĪŻ
ĪĪĪĪ╣½╦ŠāA┴”═ŲÅVĄ─ EtherCAT īŹĢr╣żśIęį╠½ŠWė┌ 2014 ─Ļ│╔×ķųąć°ć°╝ę═Ų╦]ąįś╦£╩Ż¼▓óęč╚ļŠÄ╣żą┼▓┐Ą─ĪČć°╝ęųŪ─▄ųŲįņś╦£╩¾wŽĄĮ©įOųĖ─ŽĪĘĪŻū„×ķę╗╝ę╝╝ąg“īäėą═╣½╦ŠŻ¼▒ČĖŻę╗ų▒ūóųžį┌╝╝ąg╔ŽīżŪ¾═╗ŲŲäōą┬Ż¼į┌śIā╚ŽĒėą“äōą┬ę²Ūµ”Ą─├└ūuĪŻ▒ČĖŻ╗∙ė┌ PC Ą─┐žųŲ╝╝ągŠ▀ėą┴╝║├Ą─ķ_Ę┼ąįŻ¼╦³ų¦│ų╦∙ėąų„┴„Ą─╣żśI═©ą┼ģfūhŻ¼īó IT ╝╝ągĪó╗ź┬ōŠW║═ūįäė╗»╝╝ąg═Ļ├└╚┌║Žį┌ę╗ŲŻ¼×ķīŹ¼F╣żśI 4.0 ║═ųŪ─▄ųŲįņĄņČ©┴╦łįīŹĄ─╝╝ąg╗∙ĄAĪŻ
ĪĪĪĪĖ³ČÓą┬┬äšł×gė[Ż║ https://www.beckhoff.com.cn

 ų„šŠų®ųļ│ž─Ż░ÕŻ║
色网在线观看
|
在线亚洲播放
|
久久久www成人免费无遮挡大片
|
av在线免费播放
|
色综合久久88色综合天天
|
国产日韩欧美在线
|
欧美另类视频在线
|
国产精品视频播放
|
国产一区二区在线免费观看
|
久久久久国产精品一区
|
亚洲国产日韩欧美
|
久久久久亚洲
|
亚洲精品电影网在线观看
|
亚洲最大福利网站
|
18av在线视频
|
日韩欧美三级
|
日韩av一区在线
|
99福利在线
|
五月毛片
|
久久99精品久久久久久青青日本
|
久久久91精品国产一区老牛影视
|
精品一区二区三区在线视频
|
玖玖精品视频
|
国产精品久久久久久久妇女
|
a级片在线观看
|
国产伦精品一区二区三区
|
久久久久国产精品午夜一区
|
99国产精品久久
|
久久专区
|
午夜日韩在线
|
这里只有精品免费视频
|
亚洲精品福利在线
|
精品国产精品三级精品av网址
|
久久精品视频一区
|
成人在线视频网址
|
久久美女性网
|
一区二区三区在线视频播放
|
日韩欧美在线一区二区三区
|
国产黄在线观看
|
国产一区二区播放
|
欧美三级电影在线观看
|
ų„šŠų®ųļ│ž─Ż░ÕŻ║
色网在线观看
|
在线亚洲播放
|
久久久www成人免费无遮挡大片
|
av在线免费播放
|
色综合久久88色综合天天
|
国产日韩欧美在线
|
欧美另类视频在线
|
国产精品视频播放
|
国产一区二区在线免费观看
|
久久久久国产精品一区
|
亚洲国产日韩欧美
|
久久久久亚洲
|
亚洲精品电影网在线观看
|
亚洲最大福利网站
|
18av在线视频
|
日韩欧美三级
|
日韩av一区在线
|
99福利在线
|
五月毛片
|
久久99精品久久久久久青青日本
|
久久久91精品国产一区老牛影视
|
精品一区二区三区在线视频
|
玖玖精品视频
|
国产精品久久久久久久妇女
|
a级片在线观看
|
国产伦精品一区二区三区
|
久久久久国产精品午夜一区
|
99国产精品久久
|
久久专区
|
午夜日韩在线
|
这里只有精品免费视频
|
亚洲精品福利在线
|
精品国产精品三级精品av网址
|
久久精品视频一区
|
成人在线视频网址
|
久久美女性网
|
一区二区三区在线视频播放
|
日韩欧美在线一区二区三区
|
国产黄在线观看
|
国产一区二区播放
|
欧美三级电影在线观看
|