|
ĪĪĪĪ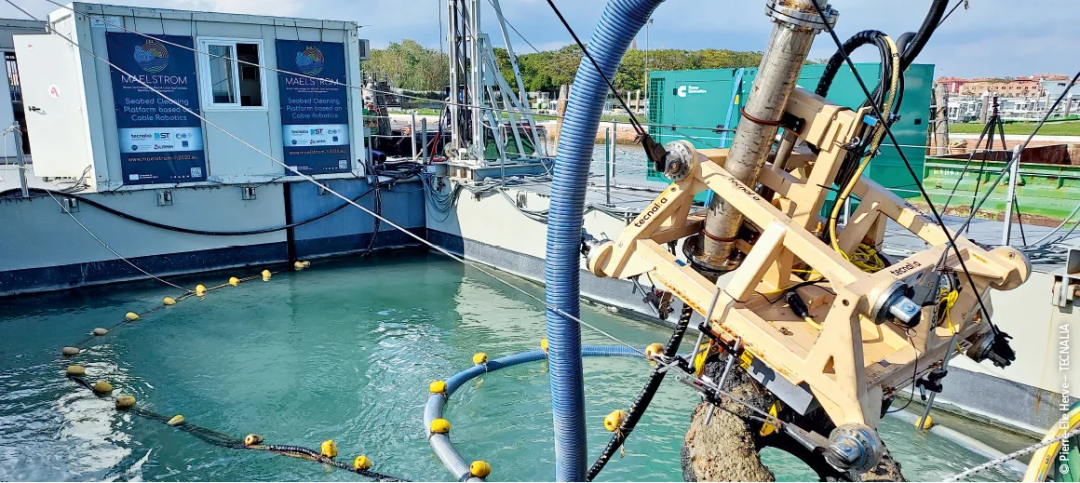
ĪĪĪĪō■(j©┤)蹊┐öĄ(sh©┤)ō■(j©┤)▒Ē├„Ż¼╦«ė“ųąĄ─ÅUŚē╬’╝sėą 70% Ģ■│┴╚ļ║ŻĄū╗“ĘųĮŌ│╔╬ó╦▄┴Ž║═╝{├ū╦▄┴ŽŻ¼┐é┴┐Ė▀▀_ 1000 ╚fćŹĪŻį┌ MAELSTROM ķ_š╣Ą─ę╗éĆ蹊┐ĒŚ─┐ųąŻ¼╦¹éāęį╚╦╣żųŪ─▄ŽĄĮy(t©»ng)×ķ╗∙ĄA(ch©│)Ż¼ķ_░l(f©Ī)┴╦ę╗ĘNūįų„╩ĮÖCŲ„╚╦Ż¼╦³┐╔ęįį┌ 20 ├ū╔Ņ╦«ė“╠Ä▀xō±ąįĄžūRäe║═╩š╝»ÅUŚē╬’ĪŻįōŽĄĮy(t©»ng)═©▀^╗∙ė┌ PC Ą─┐žųŲ╝╝ąg(sh©┤)ūįäė┐žųŲŻ¼ęčė┌ 2022 ─Ļ 9 į┬į┌═■─ß╦╣▀\║ė═©▀^┴╦įć▀\ąąĪŻ
ĪĪĪĪ╚ń╣¹Žļę¬Ę└ų╣└¼╗°╬Ż║”┤Ó╚§Ą─╦«Ž┬╔·æB(t©żi)ŽĄĮy(t©»ng)Ż¼╗“š▀Ę└ų╣╬ó╦▄┴Ž║═╝{├ū╦▄┴Ž═©▀^╩│╬’µ£▀M╚ļ╬ęéāĄ─╔Ē¾wŻ¼Š═▒žĒÜūĶų╣╦«ė“╩▄ĄĮ▀Mę╗▓Į╬█╚ŠŻ¼ŪÕ└Ē╦«Ž┬└¼╗°ĪŻ▀@š²╩ŪÜW├╦“ĄžŲĮŠĆ 2020” — MAELSTROM ĒŚ─┐Ą──┐ś╦Ż║ķ_░l(f©Ī)║═š¹║ŽĖ„ĒŚ╝╝ąg(sh©┤)Ż¼ęįūRäeĪóŪÕ│²ĪóĘųÆ■Ė„ŅÉ║Żč¾└¼╗°▓óīóŲõ▐D(zhu©Żn)╗»×ķįŁ▓─┴ŽĪŻ×ķ┤╦Ż¼ę╗éĆė╔╬„░Óč└ TECNALIA 蹊┐į║ĪóĘ©ć° CNRS-LIRMM ÖCŲ„╚╦蹊┐╦∙║═ęŌ┤¾└¹ Servizi Tecnici ╣½╦ŠĮM│╔Ą─ć°ļH蹊┐ąĪĮMķ_░l(f©Ī)┴╦“║ŻĄū└¼╗°ŪÕ└ĒÖCŲ„╚╦”ĪŻŲõ║╦ą─╩Ūę╗éĆ┼õéõūź╩ų║═│ķ╬³čbų├Ą─╦«Ž┬ÖCŲ„╚╦Ż¼ĮĶų· 8 éĆĮg▒Pį┌┴∙éĆūįė╔Č╚ā╚(n©©i)ņ`╗ŅęŲäėĪŻ
ĪĪĪĪ╩ųäė┐žųŲ’@╩ŠŲ┴Ż║▓┘ū„╚╦åT┐╔ęį┐┤ĄĮ╦«╔Ņ£y┴┐Ąžą╬łDĪŻįōłDČ©╬╗į┌ÖCŲ„╚╦ŲĮ┼_Ą─ā╚(n©©i)▓┐ģ^(q©▒)ė“Ż©│╚╔½Šžą╬Ż®Ą─ųąą─ĪŻ╝t╔½Šžą╬▒Ē╩Š░▓╚½╣żū„ģ^(q©▒)ė“Ż¼ÖCŲ„╚╦ŲĮ┼_┼c└|╦„ų«ķg▓╗Ģ■░l(f©Ī)╔·┼÷ū▓ĪŻŽ┬ĘĮģ^(q©▒)ė“▒Ē╩Šõō└|Ą─└Ł╔ņæ¬(y©®ng)┴”ĪŻ
ĪĪĪĪÖCŲ„╚╦═©▀^é„ĖąŲ„║═özŽ±Ņ^╠Į£y║ŻĄū└¼╗°Ż¼ūįäėīóūį╝║Č©╬╗į┌└¼╗°╔ŽĘĮŻ¼▓ó─▄┼eŲųž▀_ 130 ╣½Į’Ą─╬’¾wŻ©░³└©ūįąą▄ćĪó▌å╠źĪóŽõūė║═¶~ŠW(w©Żng)Ż®ĪŻ▌^ąĪĄ─╬’¾w╗“Ų»ĖĪį┌╦«├µ╔ŽĄ─╦▄┴Ž└¼╗°ät═©▀^│ķ╬³čbų├╩š╝»ĪŻ“ė╔ė┌╬ęéā╩Ūį┌║Ż├µ╔Žū„śI(y©©)Ż¼ų╗ėąį┌ąĶę¬Ģr▓┼åóäėūź╩ų╗“│ķ╬³čbų├Ż¼ę“┤╦╬ęéā┐╔ęįīŹ¼F(xi©żn)Ė▀▀xō±ąįŻ¼ūŅ┤¾Ž▐Č╚Ąž£p╔┘ī”║ŻĄū╔·æB(t©żi)ŽĄĮy(t©»ng)Ą─ė░ĒæĪŻ”üĒūį TECNALIA Ą─ MAELSTROM ĒŚ─┐Įø(j©®ng)└Ē Mariola Rodríguez ĮŌßīĄ└ĪŻ
ĪĪĪĪČ©╬╗Įg▒Pė╔▒ČĖŻĄ─ AX5118 ╦┼Ę■“ī(q©▒)äėŲ„║═ AM8071 ╦┼Ę■ļŖÖC═¼▓Į┐žųŲĪŻ“×ķ┴╦┤_▒ŻĘĆ(w©¦n)ĮĪĪóŠ½┤_║═┐ņ╦┘Č©╬╗Ż¼╬ęéā▀xō±┴╦¤o╦ó═¼▓Į╦┼Ę■ļŖÖCĪŻ”TECNALIA └|╦„ÖCŲ„╚╦łFĻĀĄ─ļŖūė╣ż│╠Ĥ Jose Gorrotxategi ųĖ│÷ĪŻ┴Ēę╗éĆā×(y©Łu)ä▌╩Ū“ī(q©▒)äėŲ„▓╔ė├┴╦å╬ļŖ└|╝╝ąg(sh©┤)Ż©OCTŻ®Ż¼£p╔┘┴╦Įg▒PĄ─▓╝ŠĆ╣żū„║═┐šķgąĶŪ¾ĪŻĮg▒Põō╦„┐╔┤_▒ŻÖCŲ„╚╦ų¦╝▄į┌╦«Ž┬Š½┤_Č©╬╗Ż¼▓óį┌╦«┴„═─╝▒Ą─ŪķørŽ┬▒Ż│ųĖ▀ĘĆ(w©¦n)Č©ąįĪŻļŖÖC▌S╔ŽĄ─ŠÄ┤aŲ„┐╔Öz£yļŖ└|ŠĒ═▓Ą─ĮŪČ╚╬╗ų├║═▐D(zhu©Żn)öĄ(sh©┤)Ż¼Å─Č°ķgĮė┤_Č©▒P└@ļŖ└|Ą─ķLČ╚ĪŻ
ĪĪĪĪļŖ┤┼ųŲäėŲ„║═┴”é„ĖąŲ„ī”└|╦„Åł┴”Ą─▒O(ji©Īn)£y┤_▒Ż┴╦æ¬(y©®ng)ė├╦∙ąĶĄ─░▓╚½ąįĪŻ╚ń╣¹£y┴┐ĮY(ji©”)╣¹│¼│÷į╩įSĘČć·Ż¼└|╦„ÖCŲ„╚╦Ģ■┴ó╝┤═Żų╣╣żū„Ż¼▓ó’@╩ŠÕeš`ą┼ŽóĪŻ
ĪĪĪĪ╦«╔Ž╦«Ž┬é„ĖąŲ„╝»╚║
ĪĪĪĪ╦«Ž┬└|╦„ÖCŲ„╚╦ų¦╝▄ā╚(n©©i)čbėąČÓéĆé„ĖąŲ„║═özŽ±Ņ^ė├ė┌┐žųŲ║═▒O(ji©Īn)£yŻ¼ų¦│ų╩ųäėĪóūįäė║═▀h│╠▓┘ū„ĪŻ“ų╗ę¬╦«Ž┬─▄ęŖČ╚▓╗╩Ū╠½Ą═Ż¼Š═─▄╩ųäė┐žųŲözŽ±Ņ^║═šš├„¤¶ĪŻ”TECNALIA └|╦„ÖCŲ„╚╦łFĻĀĄ─ÖCąĄ╣ż│╠┼c┐žųŲ╣ż│╠Ĥ Pierre-Elie Herve ča│õĄ└ĪŻ▓┘ū„╚╦åT┐╔ęį³cō¶özŽ±Ņ^«ŗ├µųąĖą┼d╚żĄ─║ŻĄū╬╗ų├Ż¼ÖCŲ„╚╦Š═Ģ■ūįäė┐┐Į³▀@ą®╬╗ų├ĪŻÖCŲ„╚╦ų¦╝▄╔ŽĄ─ē║┴”é„ĖąŲ„┐╔Öz£yØō╦«╔ŅČ╚Ż¼æTąį£y┴┐å╬į¬Ż©IMUŻ®┐╔┐žųŲÖCŲ„╚╦į┌╦«ųąĄ─╬╗ų├ĪŻČÓŲš└š╦┘Č╚āxŻ©DVLŻ®═©▀^╦─éĆ┬Ģ╝{é„ĖąŲ„ėøõøęŲäėŲĮ┼_┼c║ŻĄūĄ─ŠÓļx╝░ŲõŽÓī”╦┘Č╚ĪŻ
ĪĪĪĪŲõ╦³é„ĖąŲ„Ż©░³└©ę╗éĆē║┴”é„ĖąŲ„Ż®Ę┼ų├į┌╦«╔ŽĖĪś“╔ŽŻ¼ė├ė┌į┌╔ŅČ╚┐žųŲ▀^│╠ųąčaāö┤¾ÜŌē║┴”Ą─ūā╗»ĪŻā╔éĆ GPS īŹĢräėæB(t©żi)Č©╬╗čbų├īŹĢr┤_Č©±g┤¼Ą─╬╗ų├║═┤╣ų▒ĘĮŽ“ĪŻüĒūį▀@ą®▓╗═¼ŽĄĮy(t©»ng)Ą─╦∙ėąöĄ(sh©┤)ō■(j©┤)Č╝▒╗š¹║ŽĄĮÖCŲ„╚╦Ą─┐žųŲ║═╬╗ų├š{(di©żo)╣Ø(ji©”)ŽĄĮy(t©»ng)ųąĪŻ└²╚ńŻ¼Ė∙ō■(j©┤)▀@ą®öĄ(sh©┤)ųĄŻ¼ÖCŲ„╚╦ŲĮ┼_┐╔ęįŠ½┤_ĮėĮ³▓ó▒Ż│ųų«Ū░į┌╔ŅČ╚łDŻ©╦«╔Ņ£y┴┐Ąžą╬łDŻ®╔Ž▀xČ©Ą─╬╗ų├Ż¼Å─Č°╠ßĖ▀ÖCŲ„╚╦Ą─╣żū„ą¦┬╩ĪŻ“▀@ĘN─▄┴”ęčĮø(j©®ng)į┌═■─ß╦╣×a║■ĘŪ│Ż£åØߥ─╦«ė“ųąĄ├ĄĮ┴╦│õĘųš├’@ĪŻ”Mariola Rodríguez ųĖ│÷ĪŻ
ĪĪĪĪ└|╦„ÖCŲ„╚╦Ą─┐žųŲ║══©ą┼
ĪĪĪĪ╦«Ž┬ļŖ└|ÖCŲ„╚╦╣▓ėą 12 Ė∙▌SŻ©8 éĆĮg▒P║═ĖĪś“╬”ŚU╔ŽĄ─ 4 éĆ┤╣ų▒╗Ņäė╗¼ēKŻ®Ż¼ė╔ C6650 ┐žųŲ╣±╩Į╣żśI(y©©) PC ųą░▓čbĄ─ TwinCAT 3 ┐žųŲĪŻ╣żśI(y©©) PC ░▓čbį┌┐žųŲ╩ęĄ─ų„┐žųŲ╣±ųąĪŻ│²┴╦╦„┴”▒O(ji©Īn)£yų«═ŌŻ¼ŽĄĮy(t©»ng)Ż©┐žųŲ╩ęĪó¤oŠĆ▓┘┐ž║═Įg▒PŻ®╔ŽĄ─ČÓéĆ╝▒═Ż░┤Ōoę▓┐╔┤_▒ŻÖCŲ„╚╦░▓╚½▀\ąąĪŻŽÓæ¬(y©®ng)Ą─░▓╚½▀ē▌ŗė╔ TwinSAFE ▀ē▌ŗČ╦ūė─ŻēK EL6910 ł╠(zh©¬)ąąĪŻÄ¦▒¦ķlĄ─╦┼Ę■“ī(q©▒)äėŲ„═©▀^ AX5805 TwinSAFE “ī(q©▒)äėŲ„▀xĒŚ┐©╝»│╔ĄĮ░▓╚½æ¬(y©®ng)ė├ųąĪŻ
ĪĪĪĪ┴Ē═Ō╦─éĆ┼õļŖ─ŻēKĘų╔ó░▓čbį┌ā╚(n©©i)║¼ I/O Įė┐┌─ŻēK║═╦„┴”£y┴┐ļŖūėčbų├Ą─└|╦„Įg▒P╔ŽĪŻ┐žųŲ╣±┼c┼õļŖ─ŻēKų«ķgĄ─▀BĮė═©▀^ Ethercat P ═Ļ│╔ĪŻJose Gorrotxategi įušōĄ└Ż║“EtherCAT ╝╝ąg(sh©┤)Ą─▀@ę╗öUš╣╩╣Ą├ų▒┴„╣®ļŖ║═ EtherCAT īŹĢr═©ą┼─▄ē“═©▀^ę╗Ė∙ļŖ└|īŹ¼F(xi©żn)ĪŻ”

ĪĪĪĪAX5118 ╦┼Ę■“ī(q©▒)äėŲ„┐žųŲ└|╦„ÖCŲ„╚╦Ą─░╦éĆĮg▒P“ī(q©▒)äėčbų├ęį╝░Ąūū∙═ą╝▄Ą─╦─Ė∙▌SĪŻ
ĪĪĪĪÖCŲ„╚╦ŲĮ┼_┐žųŲ
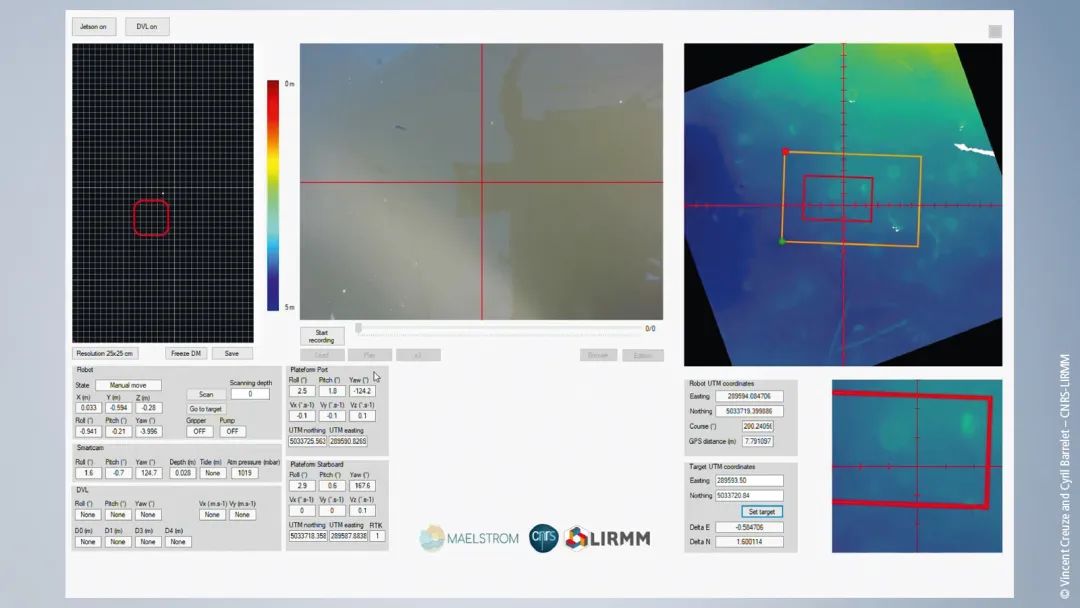
ĪĪĪĪ▓┘ū„╚╦åT═©▀^▓┘┐vŚUęį╝░╦«Ž┬ęŲäėŲĮ┼_Ą─╣└ėŗ╬╗ų├║═ęŲäėŲĮ┼_╔ŽĄ─özŽ±Ņ^┐žųŲ└|╦„ÖCŲ„╚╦ĪŻ│²┴╦═©▀^╦«Ž┬özŽ±Ņ^▀MąąęĢėX┐žųŲų«═ŌŻ¼▓┘ū„╚╦åT▀Ć┐╔ęį═©▀^ HMI ▀xō±▓╗═¼Ą─┐žųŲ─Ż╩ĮŻ¼▓óĖ∙ō■(j©┤)é„ĖąŲ„öĄ(sh©┤)ųĄ▒O(ji©Īn)£y╦∙ėą╣”─▄ĪŻ
ĪĪĪĪė├ė┌╦«Ž┬Ėąų¬Ą─özŽ±ÖCŽĄĮy(t©»ng)ų„ę¬īŹ¼F(xi©żn)ęĢėX╦┼Ę■┐žųŲŻ║▓┘ū„╚╦åTę╗Ą®┐┤ĄĮ║Żč¾└¼╗°Ż©ė╔ė┌╦«▒╚▌^£åØ߯¼ŠÓözŽ±Ņ^Ą─ŠÓļxŽÓī”▌^Č╠Ż®Ż¼Š═┐╔ęį³cō¶özŽ±Ņ^«ŗ├µųąĄ─└¼╗°Ż¼└|╦„ÖCŲ„╚╦Ą─ęŲäėŲĮ┼_Š═Ģ■ūįäė┐┐Į³└¼╗°ĪŻ
ĪĪĪĪHMI ųą▀Ć╝»│╔┴╦═©▀^ DVL ŽĄĮy(t©»ng)║═özŽ±Ņ^äō(chu©żng)Į©Ą─╔ŅČ╚łDĪŻ▓┘ū„╚╦åT┐╔ęį▀xō±«ŗ├µųąĄ─╚╬ęŌę╗éĆ╬╗ų├Ż¼╚╗║¾ęŲäėŲĮ┼_Š═Ģ■Ž“įō╬╗ų├ęŲäėĪŻ│²┴╦╩ųäė▓┘ū„ų«═ŌŻ¼ų¦╝▄▀Ć─▄ūįäėūRäeĪóµiČ©║═╩š╝»└¼╗°ĪŻ“╚╦╣żųŪ─▄╩ŪīŹ¼F(xi©żn)▀@ę╗ŪąĄ─╗∙ĄA(ch©│)Ż¼╦³─▄ē“ūRäe║Żč¾└¼╗°Ż¼▓ó▀xō±ūŅ║Ž▀mĄ─ŪÕ│²čbų├ĪŻ”Pierre-Elie Herve ĮŌßīĄ└ĪŻ
ĪĪĪĪßśī”║ŻĄū└¼╗°ŪÕ└ĒÖCŲ„╚╦ŲĮ┼_ķ_░l(f©Ī)Ą─▄ø╝■┐╔ęįīŹĢrėŗ╦ŃÖCŲ„╚╦Ą─Ąž└Ē╬╗ų├Ż¼▀@ę¬Üw╣”ė┌īŹĢr╚½Ū“Č©╬╗ŽĄĮy(t©»ng)Ż©īŹĢräėæB(t©żi)£y┴┐╗“ RTKŻ®║═žōž¤£y┴┐║═ł¾Ėµ╬╗ų├╗“ĘĮŽ“▓ó═¼Ģr▒O(ji©Īn)£y║═┐žųŲĮg▒PĄ─æTąį£y┴┐čbų├ĪŻ┤╦═ŌŻ¼║ŻĄūĄžą╬łD╔ŽĢ■’@╩ŠÖCŲ„╚╦║═└¼╗°╬╗ų├ĪŻÖCŲ„╚╦╝╚┐╔ęįūįų„ęŲäėŻ¼═©▀^▄ø╝■┤_Č©“╦«ųąĄ─▀\äė▄ē█E”Ż¼ę▓┐╔ęį═©▀^▓┘┐vŚU╩ųäė┐žųŲĪŻÖCŲ„╚╦ęŲäėĢrŻ¼özŽ±Ņ^║═┬ĢīWé„ĖąŲ„Ģ■Æ▀├Ķ║ŻĄūŻ¼£y┴┐╔ŅČ╚Ż©╦«╔ŅŻ®▓ó╠Į£y└¼╗°ĪŻ▀@ą®öĄ(sh©┤)ō■(j©┤)Č╝ėąĄž└Ēū°ś╦Ż¼▓óį┌Ąžą╬łD╔ŽīŹĢr’@╩ŠĪŻ
ĪĪĪĪĻP(gu©Īn)ė┌Ą┬ć°▒ČĖŻ
ĪĪĪĪ▒ČĖŻŻ©BeckhoffŻ®╩Ūę╗╝ęīŻūóė┌ūįäė╗»ą┬╝╝ąg(sh©┤)Ą─Ą┬┘YŲ¾śI(y©©)Ż¼äō(chu©żng)┴óė┌ 1980 ─ĻŻ¼┐é▓┐╬╗ė┌Ą┬ć°═■Ā¢╩ąĪŻū„×ķ╚½Ū“ūįäė╗»╝╝ąg(sh©┤)Ą─“ī(q©▒)äėš▀Ż¼▒ČĖŻČ©┴x┴╦ūįäė╗»ŅI(l©½ng)ė“Ą─įSČÓś╦£╩Ż¼╩Ūć°ļHś╦£╩Ą─ųŲČ©š▀║══Ųäėš▀ĪŻ╣½╦Š╦∙╔·«a(ch©Żn)Ą─╣żśI(y©©) PCĪó¼F(xi©żn)ł÷┐éŠĆ─ŻēKĪó“ī(q©▒)äė«a(ch©Żn)ŲĘ║═ TwinCAT ūįäė╗»▄ø╝■śŗ(g©░u)│╔┴╦ę╗╠ū═Ļš¹Ą─ĪóŽÓ╗ź╝µ╚▌Ą─┐žųŲŽĄĮy(t©»ng)Ż¼┐╔×ķĖ„éĆ╣ż┐žŅI(l©½ng)ė“╠ß╣®ķ_Ę┼╩Įūįäė╗»ŽĄĮy(t©»ng)║══Ļš¹Ą─ĮŌøQĘĮ░ĖĪŻĮø(j©®ng)▀^ 40 ─ĻĄ─░l(f©Ī)š╣║═┼¼┴”Ż¼▒ČĖŻęčį┌╩└ĮńĖ„ĄžįO(sh©©)┴ó 30 ČÓ╝ęĘųų¦ÖCśŗ(g©░u)Ż¼╝ė╔Ž╚½Ū“Ą─║Žū„╗’░ķŻ¼śI(y©©)äš(w©┤)▒ķ╝░ 70 ČÓéĆć°╝ę║═Ąžģ^(q©▒)ĪŻ
ĪĪĪĪ▒ČĖŻė┌ 1997 ─Ļ▀M╚ļųąć°╩ął÷Ż¼ųąć°ģ^(q©▒)┐é▓┐┬õæ¶ė┌╔Ž║Ż╩ą▒▒Ė▀ą┬«a(ch©Żn)śI(y©©)ł@ģ^(q©▒)Ż¼¼F(xi©żn)ėąåT╣ż 300 ╚╦Ż¼▐k╩┬╠Ä▒ķ╝░ć°ā╚(n©©i) 30 ū∙┤¾ųą│Ū╩ąĪŻäō(chu©żng)ą┬«a(ch©Żn)ŲĘ║═ĮŌøQĘĮ░ĖÅVĘ║æ¬(y©®ng)ė├ė┌’L┴”░l(f©Ī)ļŖĪó░ļī¦¾wĪó╣ŌĘ³╠½Ļ¢─▄ĪóļŖūėųŲįņĪóĮī┘╝ė╣żĪó░³čbÖCąĄĪóėĪ╦óÖCąĄĪó╦▄┴Ž╝ė╣żĪó▌å╠ź╝ė╣żĪó─Š▓─╝ė╣żĪó▓Ż┴¦ÖCąĄĪó╬’┴„▌ö╦═ęį╝░śŪėŅūįäė╗»Ą╚▒ŖČÓŅI(l©½ng)ė“ĪŻ
ĪĪĪĪ╣½╦ŠāA┴”═ŲÅVĄ─ EtherCAT īŹĢr╣żśI(y©©)ęį╠½ŠW(w©Żng)ė┌ 2014 ─Ļ│╔×ķųąć°ć°╝ę═Ų╦]ąįś╦£╩Ż¼▓óęč╚ļŠÄ╣żą┼▓┐Ą─ĪČć°╝ęųŪ─▄ųŲįņś╦£╩¾wŽĄĮ©įO(sh©©)ųĖ─ŽĪĘĪŻū„×ķę╗╝ę╝╝ąg(sh©┤)“ī(q©▒)äėą═╣½╦ŠŻ¼▒ČĖŻę╗ų▒ūóųžį┌╝╝ąg(sh©┤)╔ŽīżŪ¾═╗ŲŲäō(chu©żng)ą┬Ż¼į┌śI(y©©)ā╚(n©©i)ŽĒėą“äō(chu©żng)ą┬ę²Ūµ”Ą─├└ūuĪŻ▒ČĖŻ╗∙ė┌ PC Ą─┐žųŲ╝╝ąg(sh©┤)Š▀ėą┴╝║├Ą─ķ_Ę┼ąįŻ¼╦³ų¦│ų╦∙ėąų„┴„Ą─╣żśI(y©©)═©ą┼ģf(xi©”)ūhŻ¼īó IT ╝╝ąg(sh©┤)Īó╗ź┬ō(li©ón)ŠW(w©Żng)║═ūįäė╗»╝╝ąg(sh©┤)═Ļ├└╚┌║Žį┌ę╗ŲŻ¼×ķīŹ¼F(xi©żn)╣żśI(y©©) 4.0 ║═ųŪ─▄ųŲįņĄņČ©┴╦łįīŹĄ─╝╝ąg(sh©┤)╗∙ĄA(ch©│)ĪŻ
ĪĪĪĪĖ³ČÓą┬┬ä?w©┤)ł×gė[Ż║ https://www.beckhoff.com.cn
|

 ų„šŠų®ųļ│ž─Ż░ÕŻ║
神马久久一区二区
|
国产精品性做久久久久久
|
亚洲女人天堂成人av在线
|
91香蕉一区二区三区在线观看
|
深夜爱爱视频
|
一级电影a
|
国产视频二区三区
|
婷婷看片
|
欧美大吊视频
|
欧美三级黄色大片
|
欧美国产在线观看
|
亚洲不卡电影
|
www.91视频聊天.com
|
玖玖在线视频
|
久久久精品成人
|
欧美 日韩 中文
|
天天干网站
|
精品三级久久久
|
日韩在线精品
|
色69av|
久久久综合精品
|
日韩色网站
|
日韩亚洲视频
|
免费a级毛片在线观看
|
亚洲三区四区
|
欧美一区二区三区在线视频
|
久久久久国产视频
|
91在线一区二区三区
|
成人欧美一区二区三区黑人动态图
|
一区二区三区在线电影
|
亚洲免费一区
|
疯狂欧洲av久久成人av电影
|
欧美国产在线观看
|
日韩一级片一区二区
|
最新高清无码专区
|
欧美在线一级
|
成人国产免费视频
|
黄色精品
|
一区二区国产视频
|
国产不卡免费视频
|
国产精品国产三级国产a
|
ų„šŠų®ųļ│ž─Ż░ÕŻ║
神马久久一区二区
|
国产精品性做久久久久久
|
亚洲女人天堂成人av在线
|
91香蕉一区二区三区在线观看
|
深夜爱爱视频
|
一级电影a
|
国产视频二区三区
|
婷婷看片
|
欧美大吊视频
|
欧美三级黄色大片
|
欧美国产在线观看
|
亚洲不卡电影
|
www.91视频聊天.com
|
玖玖在线视频
|
久久久精品成人
|
欧美 日韩 中文
|
天天干网站
|
精品三级久久久
|
日韩在线精品
|
色69av|
久久久综合精品
|
日韩色网站
|
日韩亚洲视频
|
免费a级毛片在线观看
|
亚洲三区四区
|
欧美一区二区三区在线视频
|
久久久久国产视频
|
91在线一区二区三区
|
成人欧美一区二区三区黑人动态图
|
一区二区三区在线电影
|
亚洲免费一区
|
疯狂欧洲av久久成人av电影
|
欧美国产在线观看
|
日韩一级片一区二区
|
最新高清无码专区
|
欧美在线一级
|
成人国产免费视频
|
黄色精品
|
一区二区国产视频
|
国产不卡免费视频
|
国产精品国产三级国产a
|